

- Offizieller Beitrag
An anderer Stelle hatte ich es schon angedeuted, jetzt mal ein paar Vorab-Infos.
Beim letzten MMM hatte ich Mario und Leo einen Fahrtregler4_2 geliehen. (Das ist die abgespeckte Version vom Fahrtregler4_1; es fehlt der Waffenkanal)
Es gab Rückmeldungen und Wünsche, wie eine überarbeitete Version von dem Fahrtregler aussehen könnte. Das habe ich versucht, in ein neues Hardwaredesign zu packen.
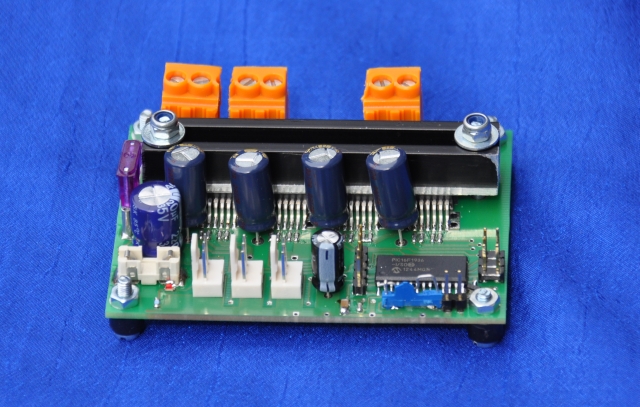
Auffällig ist auf den ersten Blick, dass für zwei Motorkanäle plötzlich drei Anschlussstecker vorhanden sind?
Es wurden hardwaremäßig aber noch weitere Features verbaut.
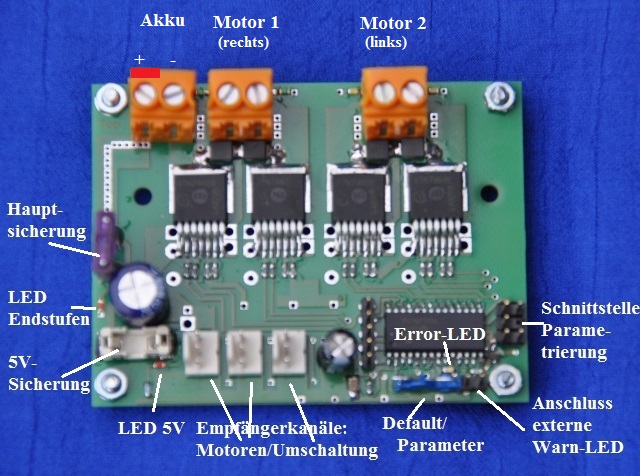
Der dritte Empfängeranschluss soll in Zukunft dafür sorgen, dass man die Fahrtrichtung vorwärts/rückwärts während des aktiven Betriebs über die Fernsteuerung ändern kann.
Die Anwendung wäre, wenn der Bot eine Waffe an der Frontseite hätte. Das Heck ist in der Regel "flach" und unbewaffnet. Wenn wir Hockey spielen, dann fahren die Bots meistens "rückwärts", um den Puck besser führen zu können. Da kommt jetzt die Umschaltung in's Spiel. Ohne Aufwand kann man den Bot an sein fahrerisches Können anpassen. ![]() (=> Ist also etwas Eigennutzen mit dabei.
(=> Ist also etwas Eigennutzen mit dabei. ![]() )
)
(Hinweis zu den obigen Fotos: Die vier Puffer-Kondensatoren sind nicht die gewünschte Größe. Normalerweise werden bei den bisherigen Fahrtreglern 470uF/35V verwendet. Die sind hier zu hoch. Laut Datenblatt wären die 330uF/35V gerade noch einsatzbar, so dass sie auf gleicher Höhe wie der Kühlkörper enden. Aber diese 330uF habe ich hier nicht auf Lager, müssen noch bestellt werden. Für das heutige Fotoshooting des Fahrtregler4_5 habe ich provisorisch vier von den 220uF/35V eingesetzt. Die haben die gleiche Bauhöhe, sind aber schlanker.)
Dann wurde eine Beschaltung integriert, mit der ich die Akkuspannung überwachen kann. Je nach Parametrierung (3S LiPo, 3S LiFePO4, 4S LiPo,...) soll bei Erreichen einer unteren Batteriespannungsgrenze eine Aktion erfolgen.
Wie die aktive Aktion aussieht, das weis ich noch nicht. Ob die Motoren nur noch 50% Maximalleistung haben (um die rettende Grube zu erreichen) oder ob der Bot komplett stoppt, das muss noch definiert werden.
Auf alle Fälle wird bei einer Unterspannung eine rote Warn-LED zum Blinken anfangen. Diese LED muss am Bot schlagfest aber gut sichtbar befestigt werden. Angesteuerut wird sie über den zweipoligen Stiftanschluss rechts unten.
Es gibt noch eine weitere Error-LED auf der Baugruppe. Die ist in erster Linie für mich gedacht, um eventuelle Hardwarefehler (durch beschädigungen) detektieren und anzeigen zu können. "Wie" das gemacht wird, ist noch nicht klar. Aber zumindest mal vorbereitet.
Die markanteste Änderung betrifft die große Sicherung für die Endstufen.
Bisher wurde hier eine KFZ-Sicherung vom Typ "FKS" verwendet. Laut Mario und Leo sollte der neue Fahrtregler "flacher" werden. Die Sicherung mit dem Halter stellte dabei das größte Hindernis dar.
Ich habe lange herumgesucht und bin dann auf eine einfach Lösung gekommen. Und zwar gibt es bei den KFZler die sogenannten Flachstecker. Kennt jeder, der im Auto schon mal mit der Elektrik herumgestopselt hat.
Diese Flachstecker gibt es auch etwas kleiner. Und die passen genau auf die Anschlüsse der kleineren KFZ-Sicherungstypen "FK1".
Hier ein Höhenvergleich von einem Fahrtregler4_1 (FKS-Sicherung und großer Kühlkörper) mit dem Fahrtregler4_5 (FK1-Sicherung und kleiner Kühlkörper):
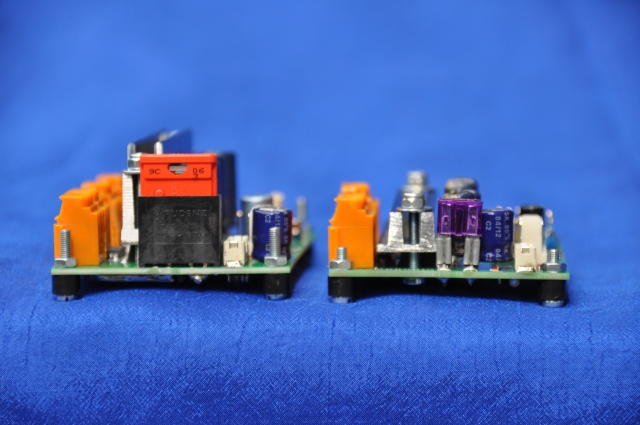
Ich muss ehrlich zugeben, dass mir derzeit mit dieser kleinen Sicherung etwas mulmig ist. Die Masse dieser Sicherung ist geringer, entsprechend kann sie weniger Verlustleistung (=Wärme) aufnehmen. Der Schmelzdraht wird also schneller seinen Schmelzpunkt erreicht haben.
Während bei einem regulären Kampf nach 3 bis 5 Minuten Schluss ist und die Sicherung wieder abkühlen kann, kann hier die Sicherung vorzeitig auslösen.
Wenn sich dieses System nicht bewährt, werde ich mir etwas Anderes überlegen müssen.
Die Software für den Fahrtregler4_5 ist natürlich noch lange nicht fertig. Ich hoffe, dass ich bis Weihnachten soweit bin. Derzeit müsst ihr also noch mit den bestehenden Fahrtregler-Entwicklungen vorlieb nehmen. ![]()
