- Offizieller Beitrag
Gyro im Bot
Nach den letzten Gesprächen zum Thema Gyro habe ich mich dazu entschlossen einfach mal einen Versuch zu starten einen meiner Bots mit einem Gyro auszustatten um die Geradeausfahrt zu verbessern.
Stalker ist gerade mal wieder zerlegt, Striker defekt, Enigma ungeeignet, Giftzwerg zu klein und fährt sowieso wie auf Schienen, also bleibt für Experimente im Moment nur Adrenalin über.
Der Bot hat die Angewohnheit bei langsamer Fahrt voraus stark nach links zu ziehen, mit zunehmender Geschwindigkeit zieht der Bot dann leicht nach rechts. Rückwärts fährt Adrenalin recht gut geradeaus.
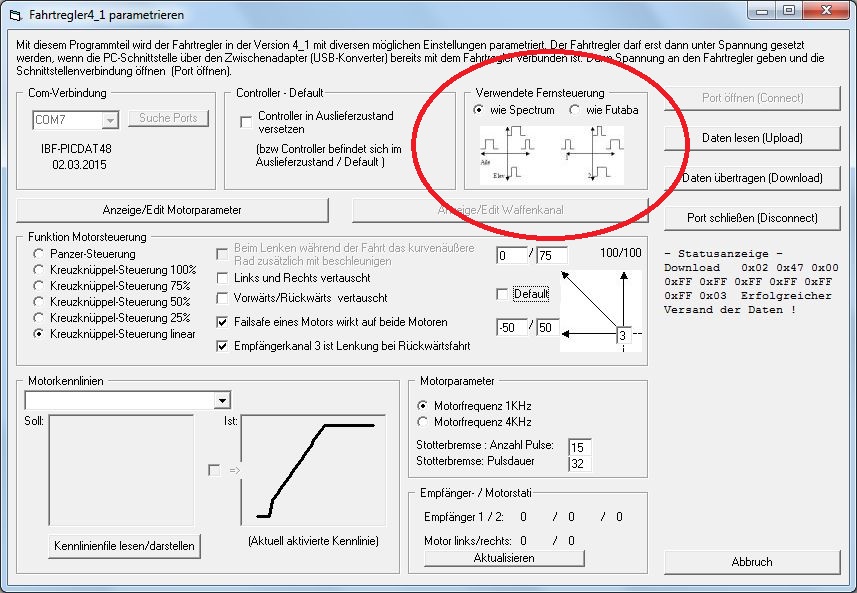
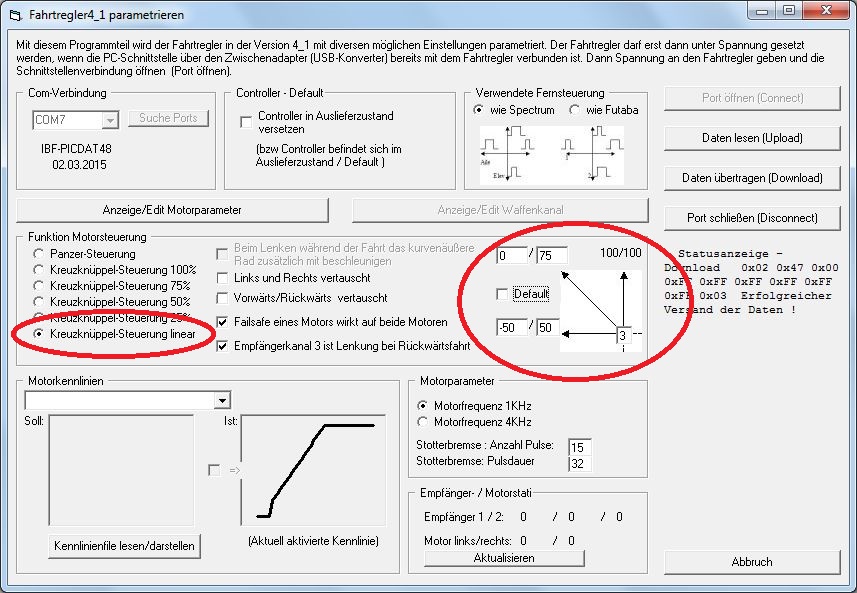
Der Antrieb besteht aus zwei Planetengetriebe Eigenbauten aus Akkuschraubern mit recht kleinen Rädern von etwa 60mm Durchmesser. Gesteuert werden die beiden zugehörigen Motoren der Baugröße 540 von einem IBF-Fahrtregler der Version 3.1. Die Firmware ist noch nicht upgedated. Nur für diesen Versuch habe ich erstmalig den Kreuzmischer im Regler aktiviert, bisher habe ich immer den Mischer im Sender benutzt.Das funktioniert jetzt nicht mehr, der Mischer muss zwingend hinter dem Gyro angeschlossen sein.
Das verwendete Gyro stammt von Hobbyking, hört auf den Namen HK401B und kostet im EU Warehouse $12,85.
http://www.hobbyking.com/hobbyking/stor…warehouse_.html
Eine Anleitung liegt nicht bei und das englische Manual aus dem Netz
http://www.hobbyking.com/hobbyking/stor…83X179727X8.pdf
ist unbrauchbar weil der wichtigste Punkt, die Umschaltung des GyroMode und die Feinjustage fehlen.
Das HK Gyro ist ein Klon des Futaba GY-401 Gyro.
Die sehr gute Futaba Anleitung passt zu 100%:
http://www.hofmann-modellsport.de/Anleitungen/GY-401-Anleitung.pdf
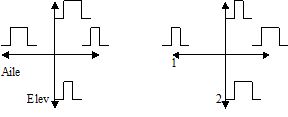
Das Gyro hat 3 Anschlüsse:
1) Eingang vom Empfänger für die rechts/links Bewegung, bei mir Kanal 1
2) Ausgang zum Regler (normalerweise Heckservo Heli)für die rechts/links Bewegung
3) Eingang vom Empfänger zur Umschaltung des Gyro Mode und Einstellung der Empfindlichkeit, bei mir Kanal 4
Ein zusätzlicher Kanal für Punkt 3) ist unbedingt nötig, sonst lässt sich das Gyro gar nicht aktivieren.
Ich habe dazu am Sender an Kanal 4 ein Potentiometer eingebaut. Der 3-Kanal Empfänger wurde gegen einen 4-Kanal Empfänger ausgetauscht.
Belegung:
Kanal 1 rechts/links
Kanal 2 vorwärts/rückwärts
Kanal 3 Auslösung Flipper
Kanal 4 Gyro Empfindlichkeit
In Mittelstellung des Potis am Sender für die Gyro Empfindlichkeit ist das Gyro deaktiviert, bei Drehung in eine Richtung wird der für uns unbrauchbare Head Hold Modus aktiviert, bei Drehung in die andere Richtung wird der Standard bzw. Normal Mode aktiviert. Je weiter man dreht, umso stärker korrigiert das Gyro die Lenkbewegungen.
Man könnte die Funktion auch auf einen Schalter legen und mit der Servoweg Begrenzung ATV am Sender feste Punkte ansteuern, mit dem Poti sind die Fahrversuche aber etwas einfacher.
Am Gyro gibt es zwei kleine Schalter. Mit dem einen habe ich den digital Modus aktiviert (eigentlich für digital Servos) und mit dem anderen die Reverse Funktion aktiviert, damit das Steuersignal richtig herum rauskommt.
Dann gibt es noch ein Poti für die Einstellung der Verzögerung (steht bei mir auf 0)
und für Wegeinstellung des rechts/links Ausgangs (steht bei mir auf max.)
Andere Einstellungen mögen sinnvoll sein, aber so funktioniert es erstmal.
Heute Morgen ging es dann endlich zur Probefahrt zum Supermarkt auf den noch leeren Parkplatz.
Das Gyro korrigierte die Fahrt geradeaus recht gut, bei langsamer Fahrt zog der Bot nur noch leicht nach links statt vorher stark nach links, bei schneller Fahrt ging es fast perfekt geradeaus. Geplante Kurvenfahrten waren auch gut möglich, wobei mir hier noch die Erfahrung fehlt wie der Kreuzmischer des IBF-Controller sich normalerweise verhält, wie gesagt ich nutze ihn zum ersten mal. Schnelle Drehungen auf der Stelle gingen gut, bei sehr langsamen Drehungen auf der Stelle stotterten die Motoren und Adrenalin bewegte sich nur ruckartig.
Vorwärts ist das Gyro also voll brauchbar.
Rückwärts sieht es etwas anders aus, da arbeitet das Gyro für uns genau falsch herum. Wenn der Bot leicht in eine Richtung ausbricht verstärkt das Gyro das Ausbrechen und der Bot dreht nur noch Pirouetten. Geradeaus rückwärts zu fahren ist völlig unmöglich, da kann man auch nicht gegensteuern. Man könnte zwar für die Fahrt zurück das Gyro deaktivieren, praxistauglich ist das aber nicht wenn man bedenkt wie oft in einem Kampf die Fahrtrichtung gewechselt wird. Gezielte Kurvenfahrten mit Vollgas rückwärts+rechts und rückwärts+links sind aber möglich.
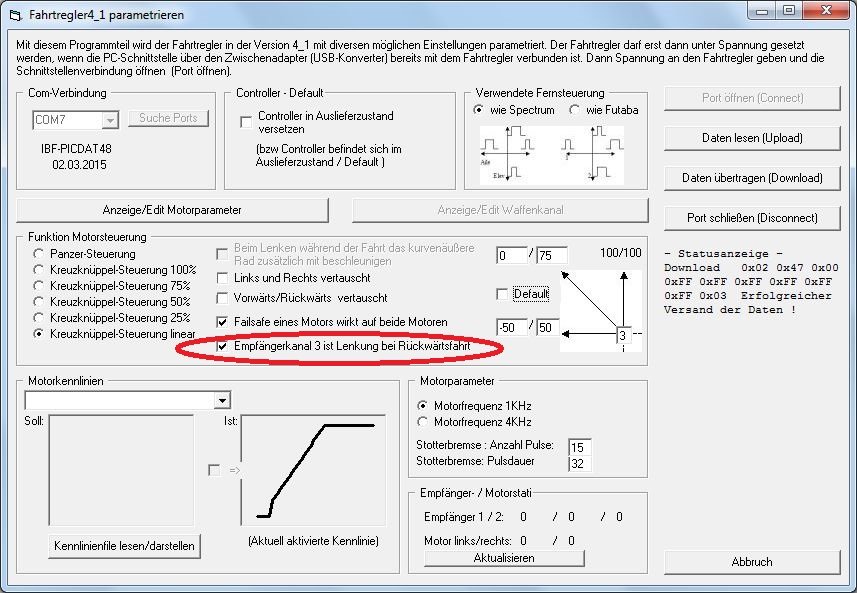
Vielleicht hat Reiner einen Lösungsansatz um seine Controller so zu optimieren dass das Gyro bei Rückwärtsfahrt deaktiviert wird, oder besser noch, richtig herum arbeitet. Dann werden die Controller wirklich langsam zur eierlegenden Wollmilchsau ![]()
Bis dahin halte ich das HK401 für begrenzt brauchbar. Da es sich per FB deaktivieren lässt bleibt es auch erst einmal in Adrenalin. Der Failsafe Test wurde weiterhin bestanden. Man sollte aber daran denken dass nach Aktivierung des Bots das Gyro ein paar Sekunden braucht um sich zu initialisieren.
Da Adrenalin nicht auf dem Rücken fahren kann habe ich in der Richtung nichts ausprobiert.
Ich hoffe dem ein oder anderen konnte ich mit diesem Text weiterhelfen. Vielleicht schaffen wir es in Zukunft dass die Bots in der Arena nicht mehr so häufig scheinbar planlos durch die Gegend fahren und schiessen beim BotHockey etwas mehr Tore ![]()
Gruss Dirk