- Offizieller Beitrag
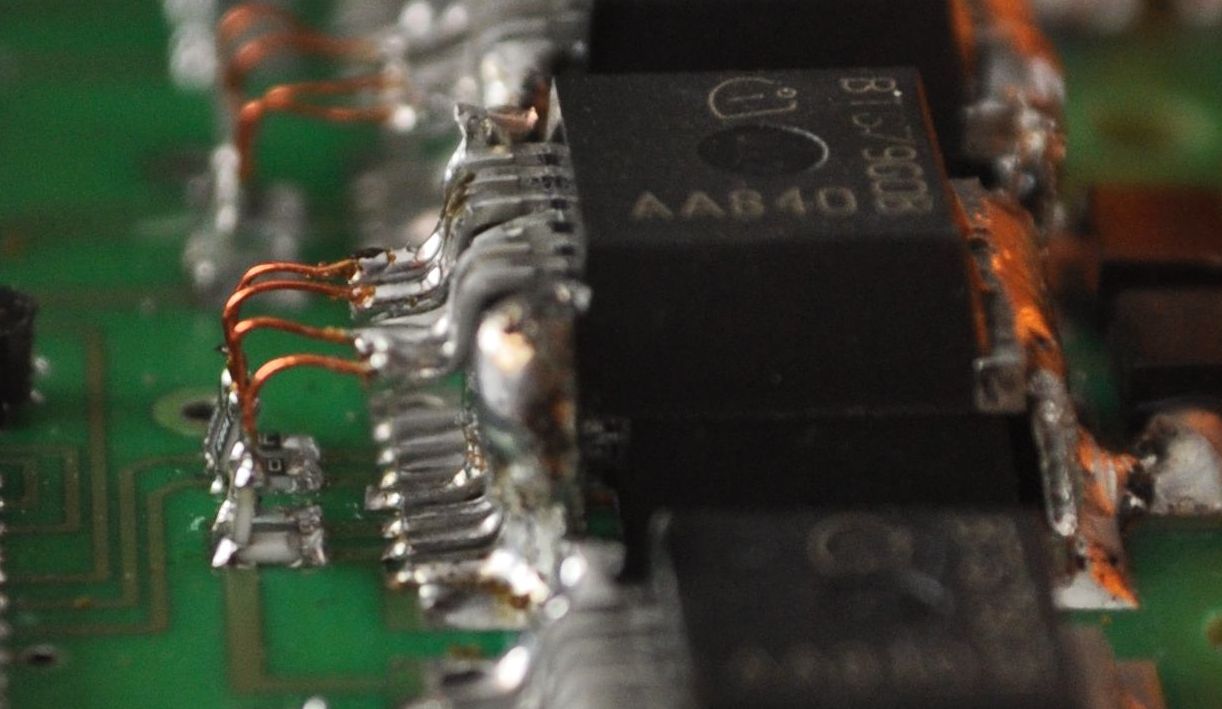
Nicht schlecht die Kühlung... So bin ich zuversichtlich dass das für reinen Fahrbetrieb halten wird. Bei ner Waffensteuerung hätte ich noch etwas Bauchweh wegen der fehlenden Strombegrenzung, aber im großen und ganzen... Schick... :]
Nun, von irgendwelchen Klebepads für Kühlkörper rate ich bei RW ab. Es gibt da aber allerdings auch 2 Komponenten Wärmeleitkleber für einen Arsch voll Geld, aber der ist jeden Cent wert. Ich hatte mal das Vergnügen und das Zeug war so gut dass ich die komplette Box am aufgeklebten Kühler für einen ASIC hoch heben konnte...