Hi,
vor ein paar Wochen habe ich mit der Planung meines Tesla 1 Roboters begonnen und diese Woche sollte er fertig werden. Eigentlich war die Fertigstellung schon etwas früher gelpant, aber ich denke ihr wisst wie das ist ![]()
Ursprünglich war meine Idee, den Roboter mit 2 Scheibenwischermotoren zu betreiben. Also habe ich 2 Stück bestellt, doch dann musste ich leider feststellen, dass die sich viel, viel zu langsam drehen. Der Motor hatte zwar ordentlich Kraft, war aber zu stark untersetzt. Also bin ich Alex's Rat gefolgt und habe mir 2 12V Gimson GR02 Motoren bestellt.
Bilder der ungeeigneten Motoren könnt ihr euch hier ansehen: )Link (Da war ich noch überzeugt davon, sie würden passen ![]()
Ein paar Tage später wurden die Motoren geliefert und die ersten Pläne fertiggestellt. Ursprünglich waren 4 Räder geplant, 2 Außen, 2 Mittig, später sogar mal eine Doppelbereifung, aber die Ideen wurden alle verworfen und ich habe mich für 2 Räder, jeweils außen, entschieden. Für die Räder habe ich mir, nach längerer Recherche, 125 mm Tretroller-Reifen bestellt.
Die alten Pläne und Bilder der Räder + Motorn gibts hier: Link
Dann wurde es ernst: Die ersten Seitenteile wurden gefertigt, aus Stahlschrott. Planungstechnisch haben sich dann auch noch Kleinigkeiten geändert, zum Beispiel werden jetzt Spitzkegeln an den Seiten befestigt um zu verhindern das der Roboter auf einer Seite aufgestellt werden kann. Auch wurden die Räder an den Motorwellen befestigt. Dazu habe ich die Gimson GR02 zerlegt und die Welle noch etwas abdrehen lassen. Die Lager wurden aus den Rädern rausgeklopft und Metallscheiben gefertigt die genau reinpassen. Zur Montage schiebt man die Räder auf die Welle, dann werden sie von ein Schraube gespannt. Erste Tests haben ganz gut ausgesehen ![]()
Bilder + Pläne mit Spitzkegeln gibt es hier: Link
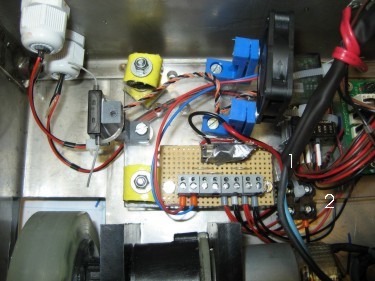
Nun zum aktuellen Stand: Die Motoren wurden bereits auf einem Verbindungstück zwischen den Seitenteilen montiert, Kabeln angelötet, Räder Befestigt. Ich warte nur noch auf eine Bestellung aus Polen um die Elektronik fertig zu montieren und testen zu können. Die Elektronik besteht aus dem DX6 Empfänger, einem Arduino-Mikrocontroller, 2 x HP Motorshields von Alex, der mir übrigens auch die Firmware dazuliefert und einem 2200 mAh LiPo.
Einen Artikel dazu gibt es hier: Link

Draufsicht
Spitzkegel aus der Nähe
Gestern wurde noch eine Holzplatte zur Befestigung der Elektronik + ein Loch zum druchfädeln der Kabeln gemacht. Das Chassis wurde aus Blech gefertigt, ist auch schon beinahe fertig, es müssen nur noch Aussparungen für die Räder, LED und Schalter gemacht werden. Für ein Failsafe habe ich mir überlegt einen größeren flachen Kippschalter im Gehäuse so tief zu versenken, dass er nicht mehr hervorsteht, aber trozdem mit dem Finger ganz einfach zu betätigen ist.
Achja: So wie ihr den Roboter auf den Bildern seht, hat er ca 9kg.
Ich freu mich schon auf eurer Kommentare und bin gespannt auf Anmerkungen, Verbesserungsvroschläge (auch wenn die vermutlich erst bei Tesla 2 realisiert werden können) und sonstiger Kritik ![]()