- Offizieller Beitrag
Nochmals vielen Dank für die Rückmeldungen.
Ich habe jetzt kombiniert:
- LiPos verlieren "zum Schluss" ziemlich schnell die restliche Kapazität.
- Das zweistufige Warnverhalten bzw. Reduzierung der Motorgeschwindigkeit scheint daher nicht nur ein "Herzenswunsch" zu sein, sondern auch technisch notwendig, um die Akkus bis zum letzten verfügbaren Ladungsträger nutzen zu können, ohne sie dabei zu schädigen.
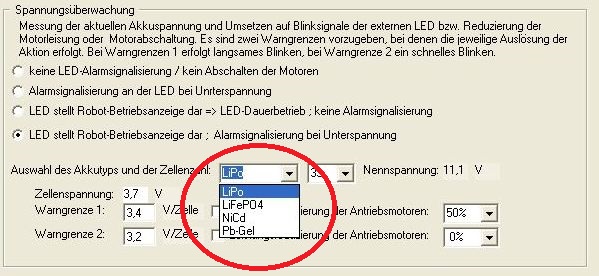
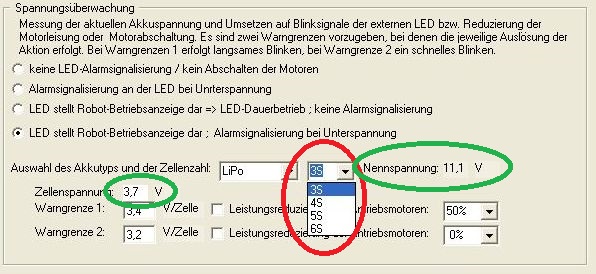
- Ihr bezieht euch am Liebsten immer auf die Spannung pro Zelle und nicht auf die Gesamtspannung des Akkus
- Die Motorgeschwindigkeit sollte bei beiden Stufen unterschiedlich wählbar sein.
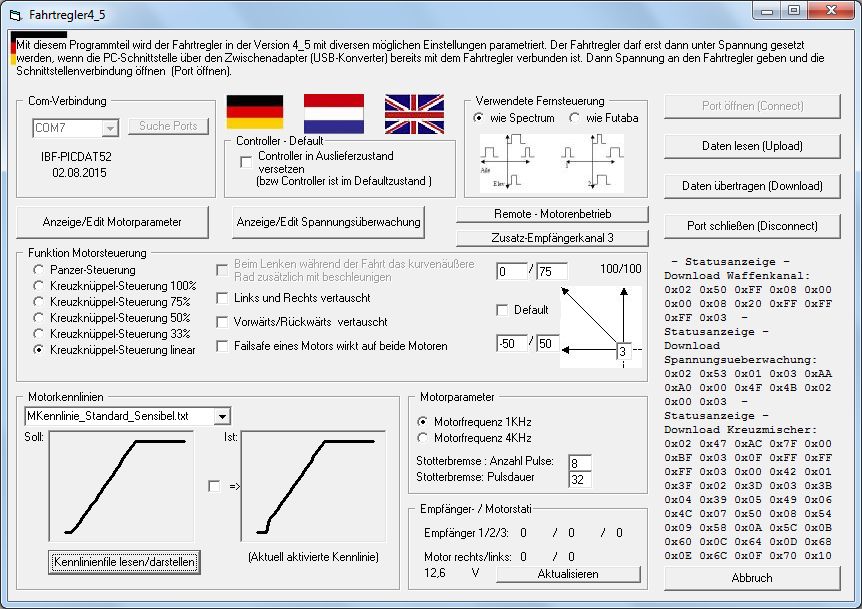
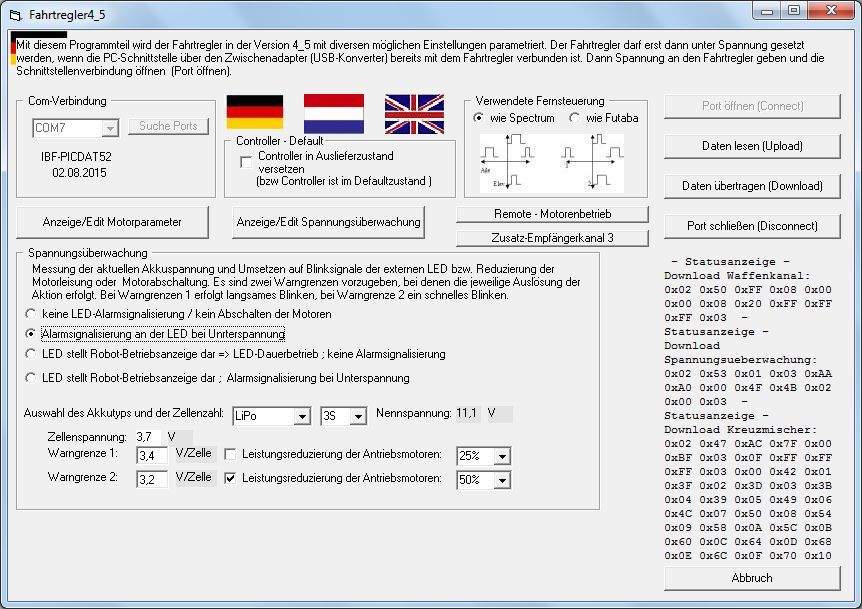
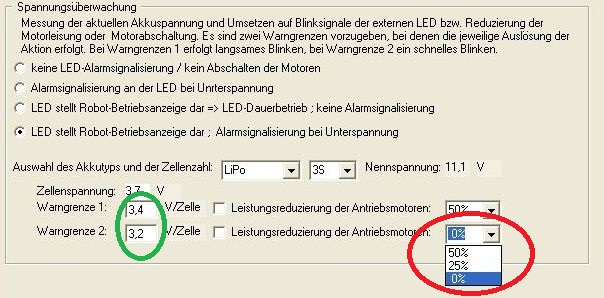
Die Gestaltung des Parametrierungsmenüs im PC wird noch einmal geändert. Bisher hatte ich mich immer auf komplette Akkuspannungen bezogen. Ich gebe zukünftig nur noch die Anzahl der Zellen an. Die beiden Spannungslimits sind dann für die Spannung pro Zelle angegeben und werden (intern) einfach wieder hochgerechnet (.... ist im PC-Programm ja kein Problem...)
Mit der frei wählbaren Option, ob bei der Eskalationsstufe 1 der Motor auf 50% reduziert wird (Vorschlag von Maddox) oder keine Reaktion hat, das kann sich dann jeder selbst auswählen.
Ebenso dann, ob bei der Eskalationsstufe 2 der Bot tatsächlich stehenbleibt oder noch mit 30% Fahrleistung in die Grube kriechen kann.
(Bei den Drohnen/Koptern ist eine Reduzierung auf 30% natürlich Quatsch, denn dann fliegt das Equipment nur noch in eine Richtung... ![]() )
)
Vielen Dank für eure Unterstützung! (Dann programmiere ich das mal so.... ![]() )
)