- Offizieller Beitrag
Hier mal zur Einleitung, um was es bei mir im nächsten "Großprojekt" geht.
Im Juli findet bei uns im Ort ein Sommerfest statt. Ist eigentlich für Familien gedacht. In den letzten Jahren waren hier entweder Familien mit Kindern in der Größenordnung "Kinderwagen" bis "Spielplatz-Schaukelbenutzer" und dann eigentlich erst wieder die älteren Besucher > 30 Lebensjahre. Heißt: Die Klientel zwischen 14 Jahre und 22 Jahre fehlt. Das möchte ich ändern. ![]()
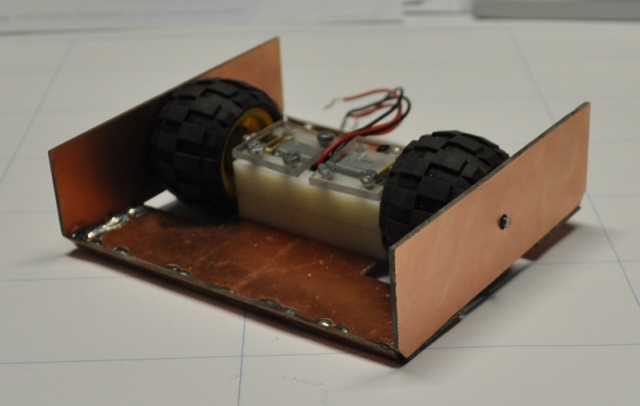
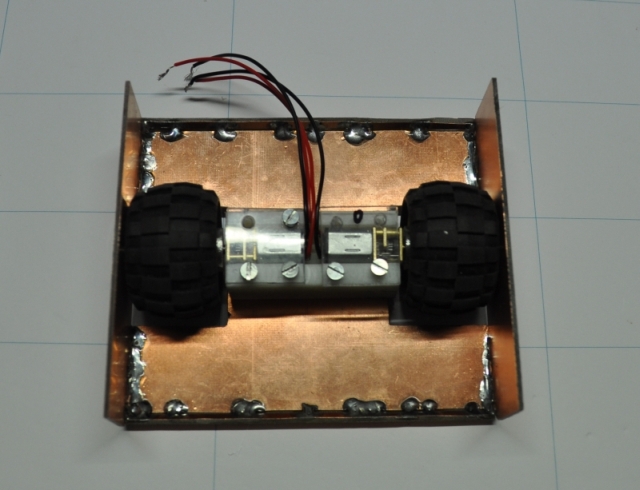
Ich habe die Chance bekommen, im Juli ein kleines Roboter-Schaukampf-Turnier zu organisieren. Nachdem ich das alleine stemmen muss, ist es notwendig, dass die Roboter ohne Probleme und Reparaturen laufen. Heißt: Keine Raptoren-Kämpfe mit meiner Übungs-Arena (fehlende Sicherheitsmaßnahmen), also "nur" Ant-Kämpfe. Die Ants müssen aber robust sein. Tun sie derzeit bei mir nicht.
Fazit: Ich werde auf das Reglement der Ants pfeifen und ein paar Ants bauen, die robust genug sind, einen Tag Dauerbetrieb ohne Reparaturen zu überstehen. Mit genügend Panzerung (=Gewicht) müßte das zu realisieren sein.
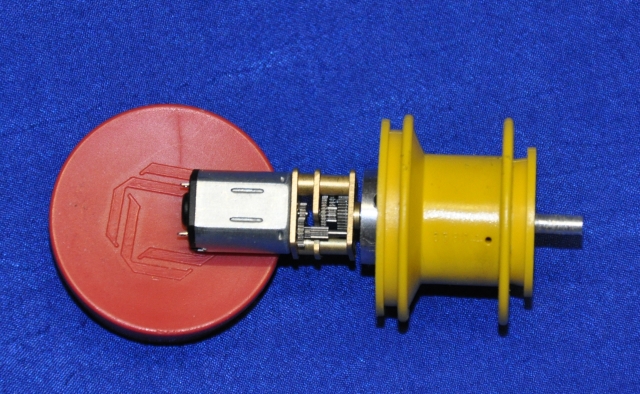
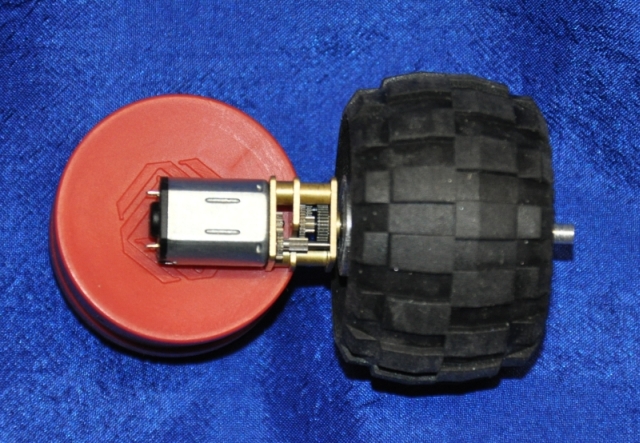
Neben ein paar "Fahrübungen" und ein bißchen "kämpfen" möchte ich das Turnier als "Hockey-Bot-Turnier" in den Vordergrund heben. Je nachdem, wieviel ich von den übergewichtigen Ants fertig bekomme, werden vier oder sechs Maschinchen gegeneinander antreten und Hockey in meiner provisorischen Arena spielen. (Die Idee für Hockey kam übrigens von Flatliner, nicht dass jemand meint, ich möchte mich mit fremden Federn schmücken... ![]() ).
).
In diesem Kapitel werde ich also sukzessiv beschreiben, wie ich diese Hockey-Ants aufbaue.
Um das nochmal in aller Deutlichkeit zu sagen: Ich will hier keine zusätzliche Roboterklasse aufbauen! Es geht nur um die Notwendigkeit, dass ich Ants so stabil bauen muss, dass sie pflegeleicht über einen längeren Zeitraum durchhalten. Das geht nur durch Verletzung der bestehenden Bau-Regeln.