- Offizieller Beitrag
Hallo Roboteers,
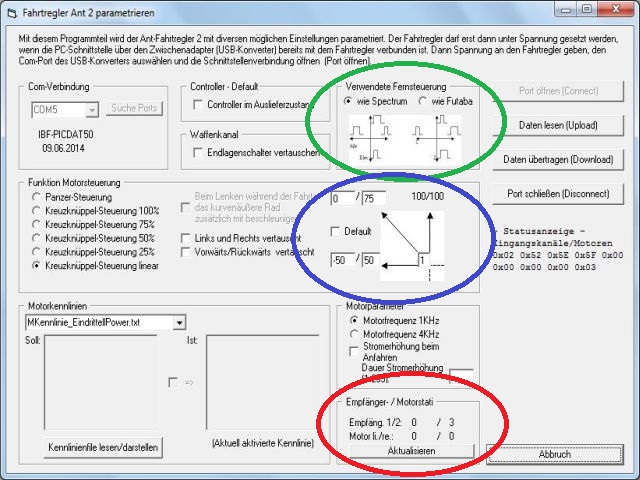
beim letzten Turnier ist ein kleiner Fehler in der Software von meinen Fahrtreglern aufgefallen: Es geht um die integrierte Kreuzmischerfunktion. Sobald eine kleine Geschwindigkeit (Kreuzknüppel nach vorne oder zurück) gefahren wird, fährt der Bot ganz normal. Wenn bei dieser kleinen Geschwindigkeit aber ein großer links/rechts-Ausschlag gemacht wird, dann stimmt die Fahrtrrichtung plötzlich nicht mehr.
Ursache war ein Fehler in der Überlagerung der beiden Stellgrößen "vorwärts"/"rückwärts" mit "links"/"rechts". Sobald der Lenkeinschlag größer war als die Fahrtrichtung, wurde der Drehsinn der Motoren (=Fahrtrichtung) falsch berechnet bzw. intern falsch vorgegeben.
Als Anlage habe ich jetzt mal eine Übersicht gemacht. Die ersten Punkte sind nur "standard", ist praktisch zum "Kennenlernen" und "Verstehen" für euch. Wichtig für mich wären die letzten vier Punkte. Liege ich da jetzt richtig? Wenn die Räder so drehen, wie das jetzt von mir vorgegeben wurde, fährt der Bot dann in die Richtung, die ihr anhand der Kreuzknüppelsteuerung vorgegeben habt?
Hier wäre die Skizze mit der Tabelle: Kreuzmischerfunktionen
//Edit: Mist, die html-Seite verliert irgendwie ihre Grafik. Hier also dann direkt eingebunden:
Randbedingungen:
Der Lenkeinschlag, also "links"/"rechts" ist auf 50% untersetzt. Heißt: bei vollem Linkseinschlag dreht der Motor nur mit 50%.
Wo ich hinauswill:
Bei der Knüppelposition 12) ist der Knüppel nur 25% in die Vorwärtsfahrtrichtung gedrückt. Also laufen beiden Motoren zunächst mal mit 25% vorwärts. Dann wird der Knüppel gleichzeitig (25% vorwärts bleibt!) auf Vollanschlag nach links gezogen. Also 50% nach links für eine Linkskurve.
Nach meiner derzeitigen Berechnung muss durch die 50% Linkskurve der linke Motor 50% langsamer laufen als die Fahrtbewegung ist. Also 25 Fahrtbewegung nach vorne minus 50% langsamer ergibt dann 25% Fahrbewegung nach rückwärts.
Der rechte Motor läuft aber weiterhin mit 25% vorwärts.
Ist das so korrekt für euch, damit ihr damit sauber steuern könnt ? (bzw. "könntet", denn die Meisten verwenden ja die Panzersteuerung oder die Kreuzmischerfunktion der Funken)