- Offizieller Beitrag
Hallo zusammen,
hier kommt die Chronik unseres zweiten Bots.
Meine Frau will ja unbedingt einen eigenen haben; ein Pusher soll es werden, und zwar aus Holz. Motoren und Räder werden wie dieselben wie bei Little Berserk nehmen, Fahrtregler kommt wieder von IBF.
Funk und Akku sind bestellt und sollten morgen eintreffen, Motoren und Fahrradmantel sind schon da und warten auf ihre Umrüstung:
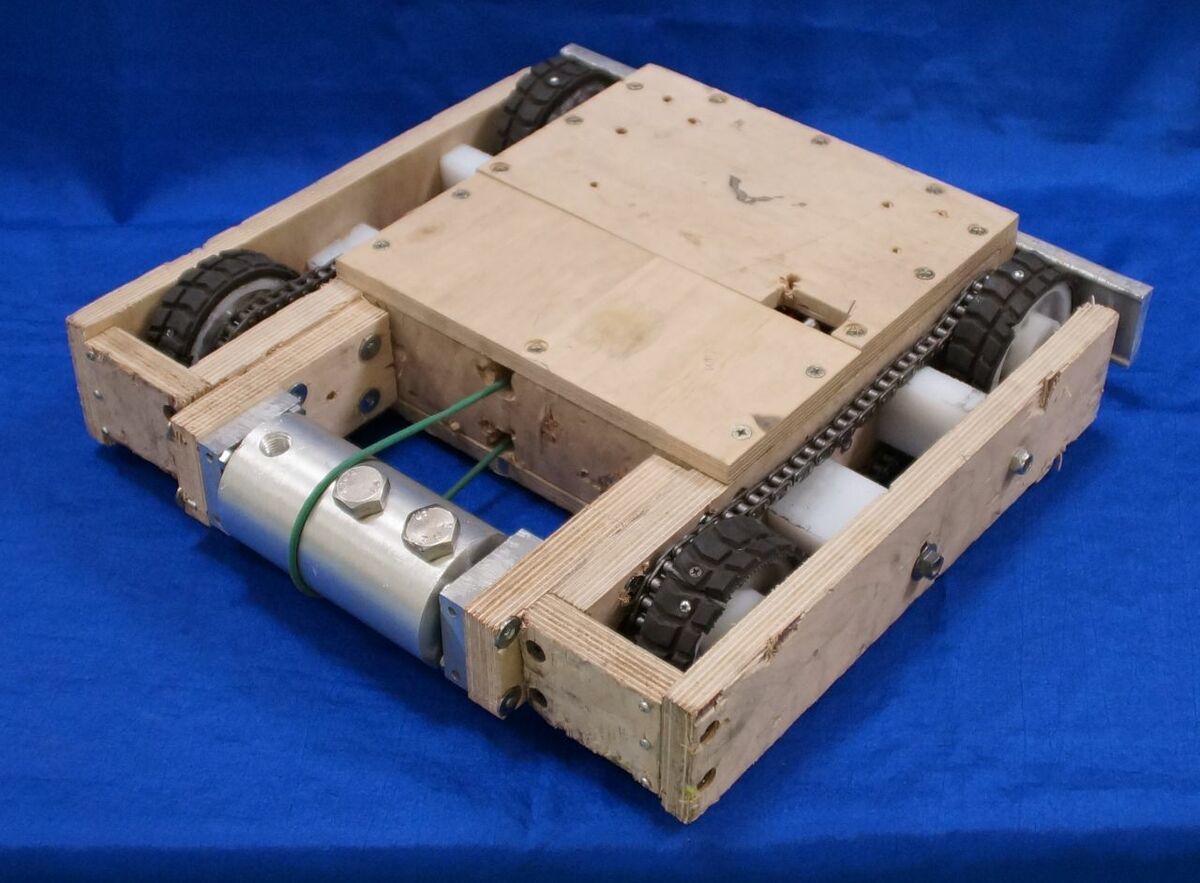
Nach einem ersten zu klein geratenem Prototypen ist nun der Rohbau des Holz-Chassis da:
Zu dem Push-Schild müssen wir noch etwas sinnieren:
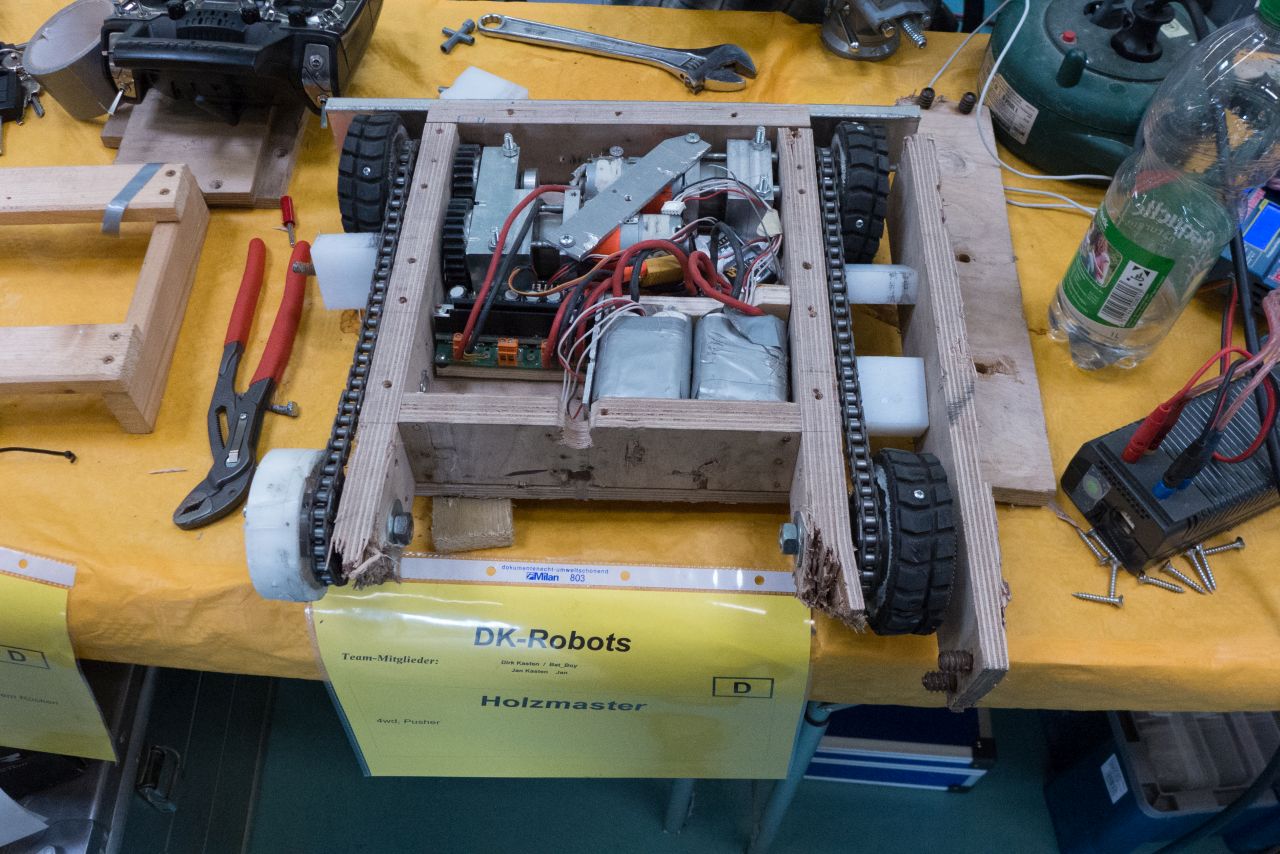
Aber da fällt uns schon noch etwas ein. Jetzt müssen erstmal die Räder ausgeschnitten und verklebt werden; und wenn morgen die M5-Madenschrauben eintreffen, dann können wir auch die Motoren umbauen. Die Motorhalter schaue ich, dass ich morgen ausdrucken kann - dann sollte eigentlich nicht mehr viel fehlen.
LG
-Michael