
- Offizieller Beitrag
http://webshop.strandbeest.com/index.php?rout…1&product_id=58
wird leider schon hergestellt ![]()
wobei...wenn kein patent auf dem mechanismus ist könnte man die beine einzeln herstellen mit befestigungspunkten für getriebemotoren^^

http://webshop.strandbeest.com/index.php?rout…1&product_id=58
wird leider schon hergestellt ![]()
wobei...wenn kein patent auf dem mechanismus ist könnte man die beine einzeln herstellen mit befestigungspunkten für getriebemotoren^^
unter weiter gehts!

könnte mit den bilder fast schon ne step-by-step-anleitung machen ![]()
wenn jemand nachbauen will. keine scheu ![]()
gebe zu baue gerade auch drann jedoch mit anderen Maßen (ka welche du nimmst ![]() ) und anderen Materialien bzw. Stärken (teilweise mit Aluminium und generell dicklicher XD und die Füse bekommen individuelle silikonteile - rutschfest )
) und anderen Materialien bzw. Stärken (teilweise mit Aluminium und generell dicklicher XD und die Füse bekommen individuelle silikonteile - rutschfest )
jo die füße werden bei mir auch noch rund gefeilt und in silikon gedippt.
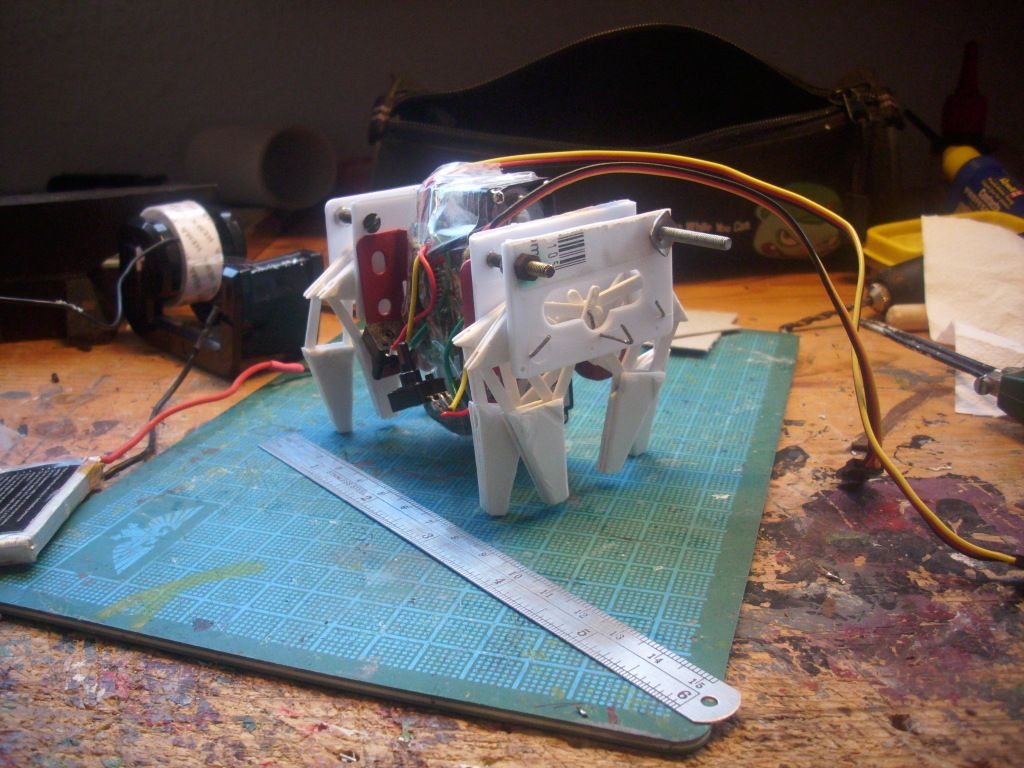
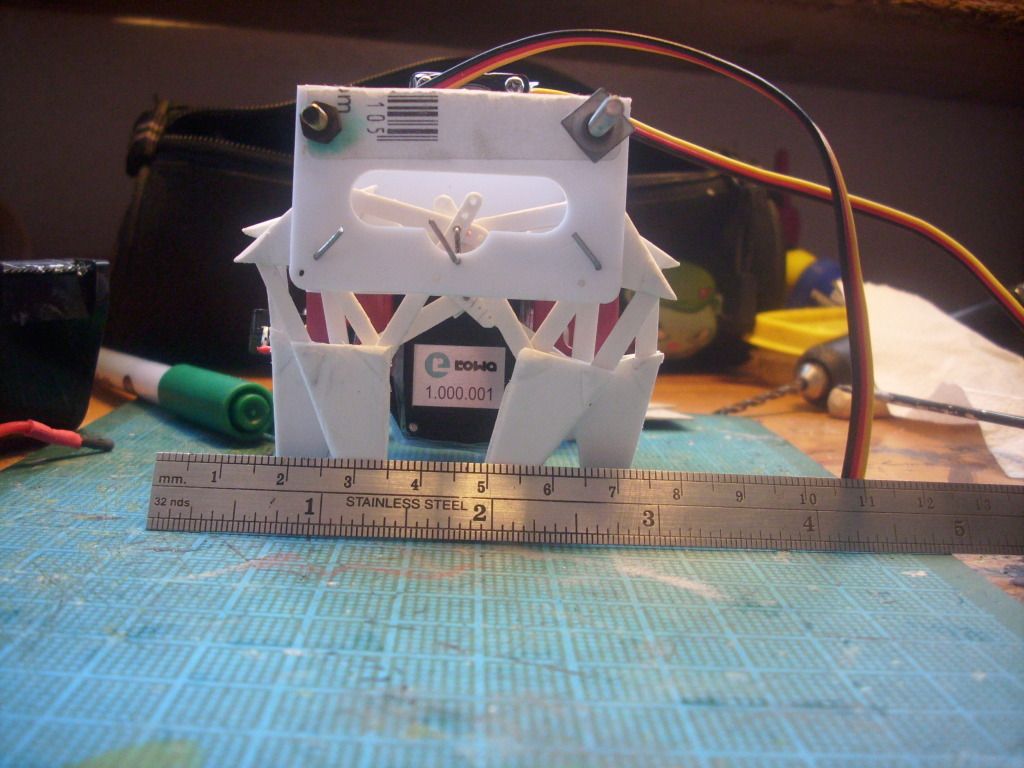
zu den maßen:
die seitenlänge der quadrate auf der schneideunterlage beträgt 1 cm.
Dann mach aber die "Füße" kürzer. Dann hast du eine bessere Verwindungssteifigkeit.
hab mal ein Bild von meinen Knubbeln rein
coole knubbel ![]()
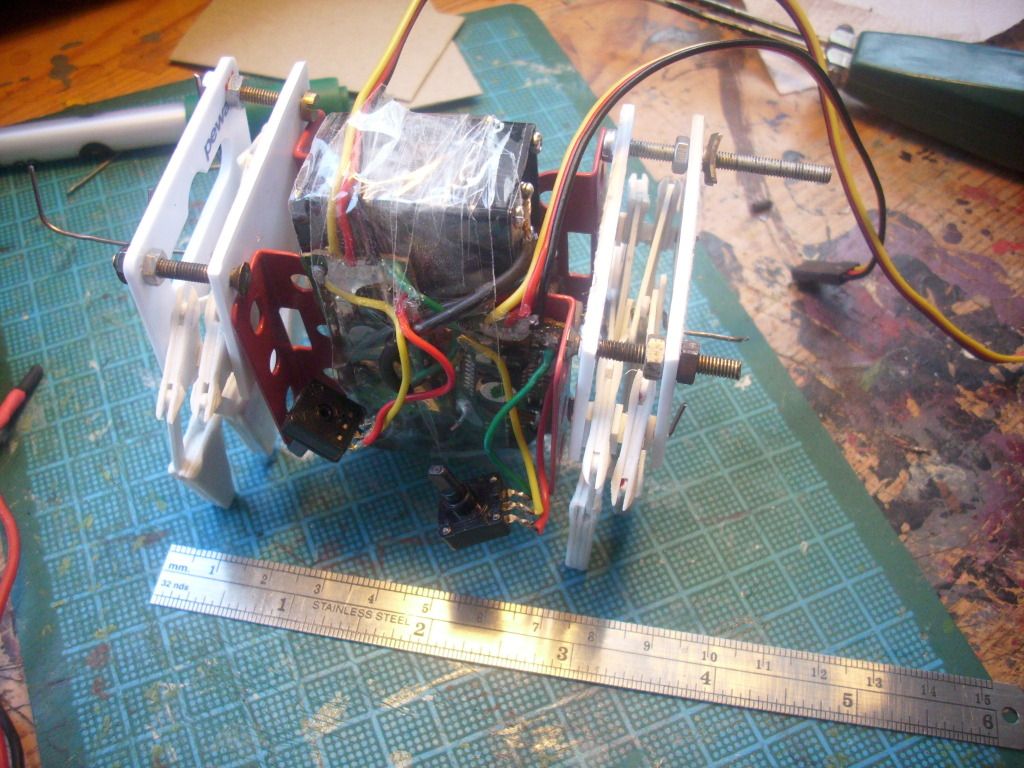
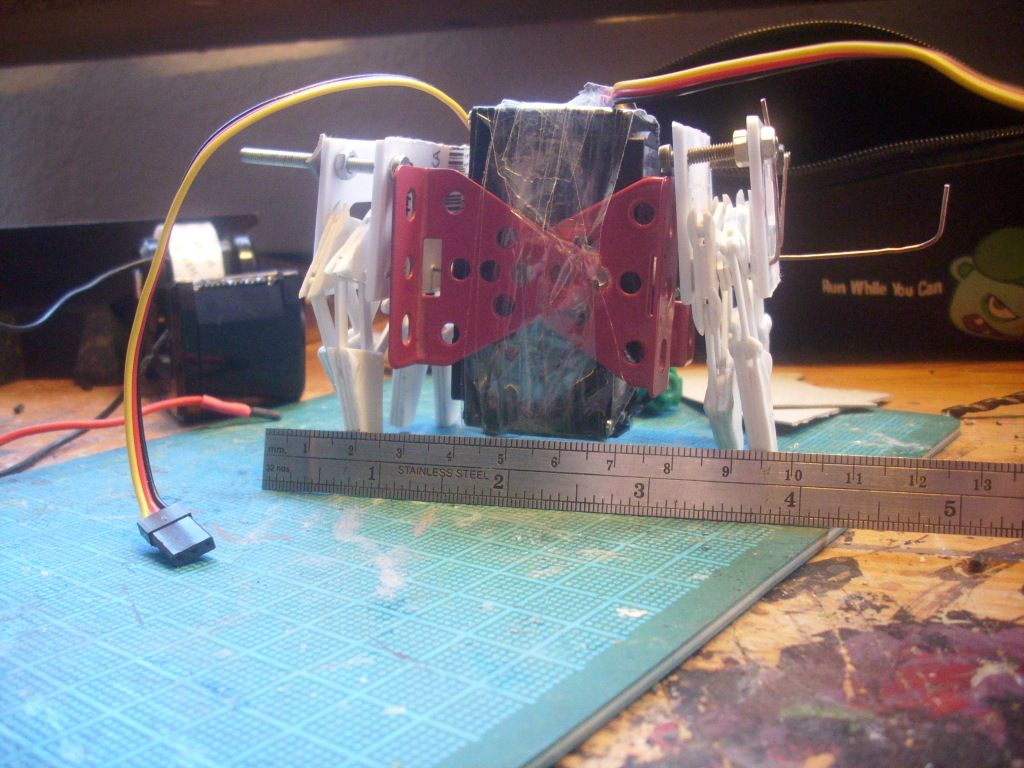
ich habe mitlerweile zwililnge:
habe leider momentan nur einen korrekt funktionierenden und nicht verbauten servo hier und kann daher noch keinen testlauf machen.
habe allerdings mal mit kaputten servos alles gewogen und komme derzeit auf 132 g. rest kann ich mit rahmen, panzerung und waffe füllen.
werde mir jetzt erstmal neue servos besorgen.
es hat mich zu sehr inne finger gejuckt!
habe mal was provisorisches zusammengezimmert um die geschwindigkeit zu testen. seht selbst:
Nicht schlecht weiter so!
Meine Güte ist das Teil schnell! Da seh ich ja echt mal alt aus gegen...
Wenn Du das gut verpackt kriegst, hast Du einen soliden Grundsatz für einen durchaus effektiven Ant. Bei der zulässigen Gesamtmasse ist ja selbst ein kleiner Spinner gut (man könnte einen Horizontalspinner unter den Bot setzen, der vorne zwischen den Beinen hervorkuckt), weil der Massevorteil ja bedeutet, dass Dein bot im Zweifelsfall stehenbleibt, wenn der andere fliegt...
horizontal habe ich zu sehr angst, dass mir die beine seitlich wegknicken. wenn dann nur vertikal und gefedert. habe keine lust die beine nochmal zu bauen^^
werde erstmal schauen wie gut er mit beiden beinteilen läuft und ob ich ohne probleme eine getriebestufe rausnehmen kann.
danach mal schauen was ich platz und gewichtsmäßig noch an waffe hinbekomme.
Komme heute beim Conrad vorbei und wollte mir mal das Innenleben kaufen - hast du da einen Tipp? Habe keine Ahnung wie viel Power die Beine brauchen^^
Dass seht sehr gut aus. Welchen antrieb gebrauchst du? Einen hin-und-wieder servo oder einen motorgetriebe oder ...?
wollte mir mal das Innenleben kaufen
innenleben wovon?
Welchen antrieb gebrauchst du?
in dem video mit dem provisorischen aufbau benutze ich einen umgebauten großen standard servo mit originalübersetzung.
hin-und-wieder servo
was genau meinst du damit? also der servo ist so umgebaut, dass er wie ein getriebemotor funktioniert. kontinuierliche rotation und keine hin und her bewegung. war das deine frage?
ich glaube bei den servos wird es auch bleiben.
die verbindung zwischen servo und bein muss sehr genau sein damit es nicht hakt. da ich das leider nicht so genau hinbekomme brauche ich einen kräftigen antrieb, den das haken nicht stört.
das ist sehr schade, weil ich mit einer getriebestufe weniger in sachen geschwindigkeit mit gewöhnlichen ants mithalten könnte.
wenn es aber tatsächlich ein spinner wird, dann ist die geschwindigkeit nicht so sehr wichtig. da reicht es mir, wenn ich mich flott auf der stelle drehen kann.
naja ich werde erstmal was lauffähiges bauen. verbessern kann man anschließend immernoch.
Die Handy autokorrektur Hatts bissal versaut XD
baue ja einen knubbelwalker mit dem selben Prinzip und wollte Fragen welchen conrad Teile da zu gebrauchen sind vom Motor übern Fahrtenregler bzw. Welche Werte in Sachen Umdrehungen / Volt / Getriebe nötig sind beim Jansen-Walker auf ant Basis =)
so wird der gute wohl im groben aufbau aussehen. hinter den servos ist noch genügend platz für akku und empfänger und davor passt sogar noch ein spinner hin.
mit spinnern kenne ich mich nur noch garnicht aus ![]()
wie ist das? wird der brushless mit fahrtenregler genau wie die servos einfach an den empfänger angeschlossen?
Tolle robot, walkers sind immer spass.
wird der brushless mit fahrtenregler genau wie die servos einfach an den empfänger angeschlossen?
Ein brushless regler bekommt strohm direct von batterie, und das signal von empfanger.

Ah vielen Danke Leo!
@zebra:
uh da fragst du leider den falschen xD
in sachen getriebemotoren kenne ich mich garnicht aus, da noch nie was bestellt habe sondern alles immer beim C gekauft hab und die haben keine antgerechten getriebemotoren.
bei servos reichen die ganz normalen standard dinger für ca. 5 €
fahrtenregler ist bei servos schon mit drin.
gibt es in zwei größen. da mein mechanismus ziemlich hakt will ich die großen nehmen.
ich teste momentan auch, ob WD40 mein baumaterial angreift, oder ob ich das großzügig draufsprühen kann. das würde die sache schon um einiges leichtgängiger machen denke ich. außerdem muss ich die halterung der beine nochmal überarbeiten. die ist ziemlich ungenau geworden.
da das thema walker vor einem halben jahr von madzab das erste mal richtig ausprobiert wurde, haben wir denke ich alle noch nicht sehr viel erfahrung damit.
probier einfach aus und teile deine ergebnisse mit uns ![]()
Ich denke nicht das WD40 dein Kunststoff angreift. Bedenke nicht in die Nähe der Klebestellen sprühen. Das KÖNNTE die Klebestellen schwächen.
so kurz langeweile gehabt und alle teile für den laufmechanism gebastelt. wie hast du die kleinen löcher alle gemacht ?^^