
Man darf nicht vergessen dass das hier ein Beetle ist. Der fliegt ehr durch die Gegend als dass die Schrauben aus dem HDPE rausgerissen werden.

Knackwurst
-
-
- Offizieller Beitrag
Ich habe die alten Räder von Sippenhuhn als Grundmaterial für die neuen Räder genutzt:

Mir gefällt nicht so gut, dass ich einen gekürzten Inbus Schlüssel verwenden muss. "Spezialwerkzeug" würde ich eigentlich gerne vermeiden.
Zur Not kann man die Schrauben aber auch sicherlich mit einer Zange anziehen.
Irgendwo habe ich abweichend zum CAD Modell gearbeitet: Die Räder schleifen an der Panzerung. Ich glaube ich habe die Räder breiter gemacht als im Modell.
Kein Thema; ich kann die Motoren noch ein gutes Stück näher aneinander setzen und/oder die Räder 5mm schmaler machen (spart auch noch Gewicht).Ein erster Test zeigt eine starke Verzögerung bei Richtungswechseln der Antriebsmotoren. @IBF muss ich da was in der Software ändern/einstellen?
-
- Offizieller Beitrag
Mir gefällt nicht so gut, dass ich einen gekürzten Inbus Schlüssel verwenden muss. "Spezialwerkzeug" würde ich eigentlich gerne vermeiden.
Zur Not kann man die Schrauben aber auch sicherlich mit einer Zange anziehen.War bei Weps auch so ein ähnliches Problem. Die Lösung hatte Flatliner-Dirk ganz pragmatisch gelöst: Einfach durch den Reifen und die Felge von aussen eine Bohrung setzen, bei der dann der Imbusschlüssel durchpasst. Geht halt nur mit der langen Seite. Aber eine Zange oder ein Ringschlüssel als "Hebel" an der kurzen Seite des Schlüssels findet sich bestimmt, um beim letzten Drücker noch ein paar Newton zu spendieren.
eine starke Verzögerung bei Richtungswechseln der Antriebsmotoren. @IBF muss ich da was in der Software ändern/einstellen?
Eine Verzögerung beim Richtungswechsel bedeuted, dass das "Stotterbremsen" zu lange eingestellt ist. Es gibt zwei Parameter dafür:
Anzahl Pulse: wie oft hier ein Bremspuls ausgelöst wird
Pulsdauer: wie lange ein Puls und die anschließende Pause dauert.Ist halt eine Sache der Motoren. Bei den schweren Brummern sollte man kurze Pulse machen, dafür ein paar mehr. Bei den Akkuschraubern hat sich so typisch 5 Pulse mit einer Dauer von 10 Einheiten bewährt. => Das ist ganz Geschmackssache von jedem Fahrer und jedem Bot. Wenn es zu lange dauert, sind die Parameter zu groß. Wenn beim Richtungswechsel die Sicherung fliegt, der Motor abraucht oder gar der Fahrtregler protestiert, dann ist es zu kurz.
 => Im Prinzip "so lange wie möglich" und "so kurz wie nötig".
=> Im Prinzip "so lange wie möglich" und "so kurz wie nötig". 
-
- Offizieller Beitrag
Hast Du eine Empfehlung für diese Motoren (?):
https://shop.bristolbotbuilders.com/product/22mm/... selbstverständlich habe ich den Adapter für die Programmierung im Keller vergessen...
Kann ich mit Deinem Tool auch die aktuellen Einstellungen sehen oder kann ich diese lediglich "blind" überschreiben?
-
- Offizieller Beitrag
Man kann auch die Daten vom Fahrtregler auslesen und anzeigen.
LG
-Michael -
- Offizieller Beitrag
Kann ich mit Deinem Tool auch die aktuellen Einstellungen sehen oder kann ich diese lediglich "blind" überschreiben?
Man kann auch die Daten vom Fahrtregler auslesen und anzeigen.
LG
-MichaelJa (danke für die Vor-Antwort). Das Auslesen ist sogar Voraussetzung, dass man die aktuelle Einstellung erst einmal ausliest, bevor man den Button für den "Download" der Parameterwerte freigeschaltet bekommt. Damit soll vermieden werden, dass ein absoluter "neuer" Blödsinn ohne bisherigen Bezug zur Einstellung in den Fahrtregler geladen wird.
Zitat von finger.im.Ohr
Hast Du eine Empfehlung für diese Motoren (?):
shop.bristolbotbuilders.com/product/22mm/
Mit 3A Stallstrom ist die Belastung für die verwendeten MOSFETs noch im zulässigen Rahmen. Ich würde es mal mit der o.g. Einstellung von 5/5 probieren. Das dürfte flott genug sein zum Bremsen bis Stillstand. -
- Offizieller Beitrag
Kein Wunder das die Richtungswechsel so träge waren. Eingestellt war 255/255
 .
.Habe jetzt 5/5 gesetzt. Noch flotter wäre natürlich schön, aber ich schaue erstmal ob ich damit klar komme. Will den Regler nicht unnötig stressen.
Für vernünftige Fahrtests muss ich aber noch den Bot ganz aufbauen. Die Bodenplatte alleine wiegt viel zu wenig und hat daher keinen Grip.
Nun zeigt der Servo komisches Verhalten. Um den Nullpunkt herum und in den Endlagen hält er seine Position sauber. Wenn ich den Steuerknüppel in den Positionen dazwischen stehen lasse, zuckt der Servo stetig. Jemand eine Idee woran das liegen kann und wie man es behebt?
-
- Offizieller Beitrag
Eingestellt war 255/255
Ich weiß jetzt wirklich nicht, wie diese Werte hier in das interne EEPROM gelangen konnten.  Normalerweise wird der Upload/Download vor jeder Weitergabe von einem Regler auch mit geprüft. 255/255 ist im Prinzip das Auslesen von einer jungfräulichen Speicherzelle. Die Zeit ist ja eine Ewigkeit, bis die Motoren dann mal ihren Hintern bewegen....
Normalerweise wird der Upload/Download vor jeder Weitergabe von einem Regler auch mit geprüft. 255/255 ist im Prinzip das Auslesen von einer jungfräulichen Speicherzelle. Die Zeit ist ja eine Ewigkeit, bis die Motoren dann mal ihren Hintern bewegen.... 
Habe jetzt 5/5 gesetzt. Noch flotter wäre natürlich schön,
Du kannst ja mal 3/5 probieren, wenn der Bot für eine Probefahrt bereit ist. Aber normalerweise hat sich die Größenordnung von 5/5 bei den Raptoren als "schneller Richtungswechsel" ganz gut bewährt. => Probier's aus.
=> Wenn's die MOSFETs zerlegen sollte, schick' den Regler zu mir....
Wenn ich den Steuerknüppel in den Positionen dazwischen stehen lasse, zuckt der Servo stetig.
Den Effekt kannte ich schon von anderen Servos her. Und zwar wenn die Spannungsversorgung zu wenig Strom liefern kann. Dann bricht die Spannung vom Ausgang des Reglers her zusammen. Dieser Spannungseinbruch verstellt die interne "Abgleichbrücke" zwischen der gewünschten Sollgröße und er aktuellen Istgröße. Heißt: Da wird eine künstliche Abweichung vorgespielt. Und die möchte der Servo ausgleichen.
Jetzt habe ich diesen Servo (hab' mir ja auch ein Spielmuster besorgt, um den Beetle-Fahrtregler u.U. von bisher 2A auf 3A maximalen Ausgangsstrom tunen zu können) mal angeschlossen. Liegt diesmal nicht an dem zu großen Stromhunger.
 Hab' die Ausgangspulse am Oszi mal angesehen. Der Abstand zwischen den einzelnen Ausgangspulsen ist manchmal nicht konstant. Und das nimmt der Servo übel. Hab auch noch einen anderen Servo gefunden (Robbe) der das auch nicht mag und herumzuckt. Der Fahrtregler wurde damals mit den billigen Conrad-Servos getestet, die waren da nicht so mädchenhaft.
Hab' die Ausgangspulse am Oszi mal angesehen. Der Abstand zwischen den einzelnen Ausgangspulsen ist manchmal nicht konstant. Und das nimmt der Servo übel. Hab auch noch einen anderen Servo gefunden (Robbe) der das auch nicht mag und herumzuckt. Der Fahrtregler wurde damals mit den billigen Conrad-Servos getestet, die waren da nicht so mädchenhaft.Brauchst also mit Spannungsversorgung und diversen Zusatzelkos nicht weiter suchen. Ursächlich ist das die Software im Fahrtregler, die hier manchmal "abkürzt". Ich bringe das in Ordnung und werde Dir einen neuen Beetleweight-Fahrtregler als Ersatz zuschicken. Ich weiß nur nicht, wie lange ich zur Fehlerbehebung brauche. Die "zeitkritischen" Programmteile haben manchmal den Teufel, noch dazu, wenn es hier um Mikrosekunden für die Triggerung des Ausgangspulses geht.....

Thyrus: Ihr habt ja auch einen Beetleweight-Fahrtregler von mir im Einsatz => Kriegt auch Ersatz zugeschickt. Aber die Baugruppe muss ich erst zusammenlöten, dauert leider.....

-
- Offizieller Beitrag
Ah ok. Die Ursache mit dem Strom konnte ich mir auch nicht vorstellen, da
1. der Servo ohne Last betrieben wurde
2. das Problem nicht im Bereich des Nullpunktes und der Endlagen auftrat.
Ich weiß nur nicht, wie lange ich zur Fehlerbehebung brauche.
Also bei mir brauchst Du Dich nicht mit Ersatz beeilen. Der Servo sollte ja eh die Spannungsversorgung nicht vom Regler beziehen und das Signal kann ich auch direkt vom Empfänger nehmen.
Abgesehen davon siehst Du ja, dass meine Aktivitäten zum Teil große Pausen aufweisen. Ist nix gewonnen, wenn Du Dich extra beeilst und der neue Regler dann bei mir erstmal nur rumliegt.
-
- Offizieller Beitrag
edit: Beschreibung zu Bildern.
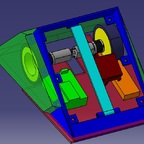
Ich habe neue Motorhalterungen aus HDPE gebaut:

Um Gewicht zu sparen werden die Klötze oben noch abgerundet - falls nötig.
Von unten sind die Halter mit jeweils vier Holz-/Blechschrauben direkt im Material befestigt.

Mal schauen wie viele Montage/Demontage-Zyklen das hält. Bisher habe ich noch keine gute Idee, wie ich Gewindeeinsätze da rein kriege. Einfach etwas unter Hitze einpressen gefällt mir nicht. Ich hätte gerne einen Hinterschnitt. Cool wäre ein winziger T-Nuten Fräser.
Ich habe mal ein Video gesehen, in dem beim 3D-Druck dem Drucker mittendrin ein manueller Filamentwechsel vorgetäuscht wurde. Der Druckvorgang hält an, um den Wechsel zu ermöglichen. Statt aber das Filament zu wechseln, wurde die Pause genutzt, um eine Mutter in den Druck einzulegen. Anschließend wurde auf der Mutter weiter gedruckt, sodass diese am Schluss komplett von Material umgeben war.
Sowas kriege ich mit herkömmlichen Fertigungsmethoden natürlich nicht hin.Die Waffenmechanik ist nun bereit zum Schweißen:

Diese Arbeitsschritte schiebe ich immer vor mir her, weil ich absolut schlecht im Schweißen bin

-
- Offizieller Beitrag
Bist ja schon wieder sehr weit gekommen.

=> Wäre also Zeit für den Update des Beetleweight-Fahrtreglers, oder? -
- Offizieller Beitrag
Hm, wie gesagt: Ich habe keine Eile damit.
Ich habe mit dem Regler in der mir vorliegenden Version keine Einschränkungen. Ich weiß ja, was er kann und was er nicht kann.Wenn Du aber gerne spezielle Aspekte des Updates getestet haben willst, kannst mir eine neue Version zuschicken.
-
- Offizieller Beitrag




-
- Offizieller Beitrag
Heute habe ich die Verkabelung fertig gemacht:


-
- Offizieller Beitrag
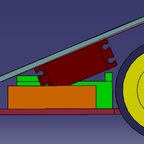
Hier mal eine Seitenansicht mit ausgeblendeter Panzerung.
Updates:
- Der Servo ist ein ganzes Stück nach vorne gerutscht.
- Neuer Akku: 2S 850 mAh (alternativ habe ich noch einen 900 mAh, der etwas länger ist, dafür schmaler und flacher).
Nächste Schritte:
- Mehr Muttern an die hardox Panzerung anschweißen
- Hardox Laschen vorne seitlich anschweißen
- Bodenplatte auf 3 mm oder sogar 2 mm reduzieren. (derzeit 4 mm)
- Falls nötig Stärke der Heckplatte reduzieren (derzeit 10 mm).
- Evtl. Akku Stecker auf XT30 ändern.
edit:
Nachdem ich die Panzerung wieder eingeblendet hatte, habe ich eine Kollision des Akkus mit der Panzerung gesehen.
Daher nun das Modell Update mit dem flacheren 900 mAh Akku, der unter den Servo passt:
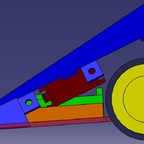
Wobei der 850 mAh Akku in der Realität sogar passen könnte. Modell und Bot weichen mittlerweile voneinander ab. Die Position des Servos ist im Modell nicht ganz korrekt.
-
- Offizieller Beitrag
Es passieren zwischendurch immer mal wieder viele kleine Updates. Leider so klein, dass sie recht unspektakulär sind und es nicht viel zu zeigen gibt.
Raddurchmesser von 65mm auf 55mm reduziert.

Bodenplatte erneuert um im Bereich der Räder weniger zu federn.

Position des Fahrtenreglers angepasst.

Antriebe weiter auseinander gesetzt (die Motoren waren mir mit ihren Kontakten zu nach beieinander)

Link mit Power-LED und LipoSaver an der Heckpanzerung befestigt.

-
- Offizieller Beitrag
Fast fertig, sehr schön.
-
- Offizieller Beitrag
Das Maschinchen wird immer perfekter.
Damit es nicht letztendlich an der Elektronik scheitert, habe ich Deine Erkenntnisse mit der Servo-Ansteuerung in die neue Firmware des Beetleweight-Fahrtreglers integriert.
Damit der Servo im Stillstand nicht so "zittert" gibt es jetzt eine Hysterese zum Einstellen. Zwischen der letzten Ausgabe der PWM an den Servo muss ein gewisser Unterschied einer neuen Vorgabe sein, damit diese Vorgabe auch wirkt. Ansonsten wird der bisherige PWM weiterhin ausgegeben.
Damit können gewisse Abweichungen bei der Erfassung von den Fernsteuersignalen "überbrückt" werden.
An dem Kreuzmischer-Modul habe ich ziemlich lange hingefuchst, um bei der Erfassung von den Fernsteuer-Pulsen die Abweichungen möglichst gering zu halten. Auch diese Erkenntnisse sind in dem Beetleweight-Fahrtregler eingeflossen. Dein Bot müsste jetzt im Stand wesentlich "ruhiger" verhalten.
Wenn Du das neue PC-Programm schon installiert hast, dann einfach starten. Der Update wird dann automatisch erkannt und durchgeführt.
Fehlt in dem Bot noch eine unwichtige Kleinigkeit: Der Fahrtregler mit der neuen Firmware.
 Wird morgen in die Paketbox gesteckt und müsste dann am Dienstag/Mittwoch bei Dir eintreffen. Den bisherigen Beetleweight-Fahrtregler kannst Du mir bei Gelegenheit dann zurückschicken.
Wird morgen in die Paketbox gesteckt und müsste dann am Dienstag/Mittwoch bei Dir eintreffen. Den bisherigen Beetleweight-Fahrtregler kannst Du mir bei Gelegenheit dann zurückschicken.@All: Wer von mir ebenfalls einen Beetleweight-Fahrtregler hat und gerne den Update haben will: Die Baugruppe einfach zu mir herschicken.
-
- Offizieller Beitrag
Danke!
Ich habe das mal in meinen Beetle Thread verschoben.
-
- Offizieller Beitrag
Danke!
Ich habe das mal in meinen Beetle Thread verschoben
Danke. Sorry, hab' Deine Bots da wohl irgendwie verwechselt gehabt....

-