
Jup IceMaster - du hast Recht da ist ein Unterschied 🤣 ich kenne mich leider mit BL einfach nicht richtig aus - dachte vorallem die Leistung sei entscheidend… Ich denke ich muss jetzt erstmal ein finales CAD Design meiner Waffe machen und dann entscheiden.
Beiträge von max.joule
-
-
Ohh - du hast absolut Recht! da habe ich irgendwie nur auf die Leistung geschaut und mich über die Masse gewundert 💀
Hast du eine Featherspinner Empfehlung von TP? eher Richtung TP5600?
-
Danke für die tollen Ratschläge. Hab mich mittlerweile für den hier entschieden - da Lieferung aus Deutschland 🤪
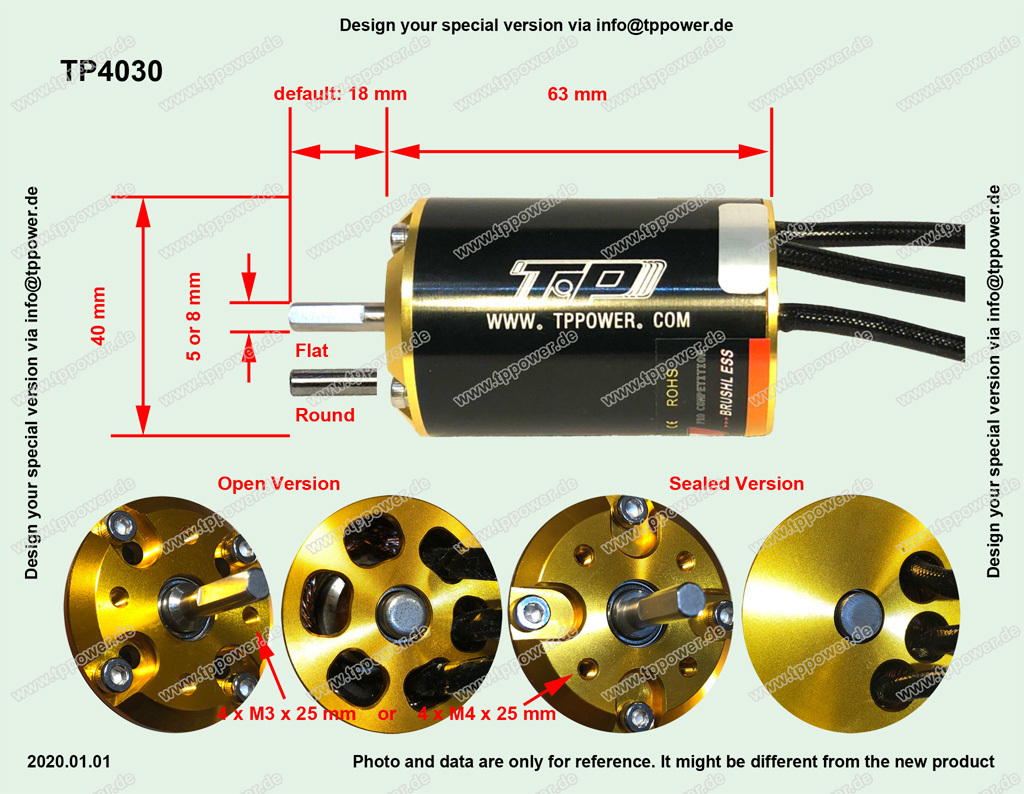 TP4030-2750KV-Open-5Ftppower.de
TP4030-2750KV-Open-5Ftppower.de -
Super vielen Dank!
Der hier scheint mir Ideal - damit dürften die 1Kj kein Problem sein oder?
 In Stock Brushless 6355 Unsealed Motor 8mm Shaft Sensored 170KVMaytech Brushless 6355 170KV Open Cover Outrunner Sensored Motor for Esk8/E-bike/Robots/Mountainboard/E-scooter Model No MTO6355-HA KV 170 Idle Current 1A…maytech.cn
In Stock Brushless 6355 Unsealed Motor 8mm Shaft Sensored 170KVMaytech Brushless 6355 170KV Open Cover Outrunner Sensored Motor for Esk8/E-bike/Robots/Mountainboard/E-scooter Model No MTO6355-HA KV 170 Idle Current 1A…maytech.cn -
-
 APS 6374 Outrunner brushless motor 170KV 3200WAPS 6374 Outrunner brushless motor 170KV 3200Walienpowersystem.com
APS 6374 Outrunner brushless motor 170KV 3200WAPS 6374 Outrunner brushless motor 170KV 3200Walienpowersystem.com -
Ich habe berechnet etwa bis zu 4Kg für mein Waffensystem also 30% des Feathers zu benutzen. Bin grade noch auf der Suche nach Outrunner und Akkus und etwas lost. Habe in den Deutschen Onlineshops bisher irgendwie eher kleineres Zeug gefunden... Bin jetzt auf diesen hier gestoßen: https://alienpowersystem.com/shop/brushless-motors/63mm/aps-6374-outrunner-brushless-motor-170kv-3200w/
Meinung dazu?
-
Super! Danke für die Rückmeldung:) So ein Brushless Regler wäre natürlich schon sehr verlockend:)))
-
Zur Info: die Getriebemotoren von Samy sind jeweils ca 580g schwer, die von BBB 416.
Damit würde ich mit 4 Motoren auf knapp 2Kg kommen - denkt ihr das ist zu brachial oder voll im Rahmen? Die von BBB haben denke ich mal weniger Power und sind halt auch kleiner aber ich denke das wäre für den Vorderanantrieb kein Problem oder?
-
hier die Teile,
Da die Motoren doch relativ groß sind überlege ich doch eventuell 2-rädrig durchzuziehen. Fürs Gewicht wollte ich mal berechnen wie schwers mit Alu-Profil und 3/4mm Hardox werden würde.
Dann will ich mich jetzt mal endlich nach einem Brushless für die Waffe umschauen. Ich habe jetzt in einer Woche 2 Wochen Ferien und hoffe das ich da ein bisschen hustlen kann, zudem will ich auf jeden Fall am 23. nach Dortmund fahren.
Das sind so momentan meine Gedanken -
-
News:
Samy hat mir großzügiger Weise ein großes Sammelsurium an Bauteilen geschickt!!! Ich hänge mal ein Bild an: es handelt sich um 2 ziemlich große Brushed Motoren, einen Fahrtenregler und Empfänger plus eine mega Fernsteuerung:) und ein bisschen HDPE Verschnitt und Lexan zum rumprobieren
Ich bin auf jeden Fall sehr glücklich weil das echt den Fortschritt pushed aber auch etwas lost/überfordert. Ich weiß theoretisch was alles noch fehlt / gemacht werden muss aber ich sehe die nächsten Schritte nicht so wirklich - mir kommt es zum Teil so vor als wär das alles vielleicht doch etwas hoch für mich - aber ich will jetzt auch nicht nur rumjammern🤣
Ich bin grade dabei mir eine kleine Werkstatt im Keller einzurichten… Mit F360 läufts nicht so - meine Idee momentan ist es eventuell einfach auf Blender mit richtigen Maßen zu switchen - da kann ich was modellieren auch ohne vorher Tutorials zu suchen 💁♂️
Moment hier kann ich nichts hochladen… Bild folgt…
-
Servus alles zusammen! Danke Runsler für den kleinen Reminder:) ! Der Schulstress hat mich doch verdammterweise wieder ziemlich eingesogen aber jetzt bin ich auf einem guten Weg endlich weiter zu kommen!
Umorientieren kommt nicht infrage für mich - ich finde die Kombination aus Engineering und ShowKämpfen so ziemlich eine der geilsten Sachen 🪄🤩
-
An der Stelle auch nochmal Danke Runsler für das nette Angebot bezüglich den Reglern!
Btw wo kriegt man dieses coole GRA Merch her das ich in der Galerie bei manchen gesehen habe?;)
-
 Alles anzeigen
Alles anzeigen1. Ich vermute, die DLC-Beschichtung wir mehr kosten, als gleich ein "besseres" Material zu nutzen.
3. Da habe ich gerade zu Anfang sehr viel wisenswertes entnommen. Auch wenn das Turorial schon etwas in die Wahre gekommen ist, und
recht viel über Bleibatterien und Bürstenmotoren schwafelt. Aber die wichtigen Dinge, wie Schwerpunktlage, Gewichtsverteilung usw. sind
m.E. sehr sehr gut erklärt.
(habe mir übrigens die Printausgabe bestellt - ein richtiges Buch liest sich einfach besser)
LG-Michael
Gute Idee - vielleicht bestelle ich mir das auch mal!
-
Übrigens die Räder von BBB sind ja unglaublich schwer oder!? Das wären dann 1,2Kg für 4 Stück?
-
So... jetzt bin ich endlich raus aus den ganzen Klausuren und kann mich wieder den wichtigen Sachen widmen!
An erster Stelle erneut: danke für euren Aufwand und den ganzen großartigen Input!! - so langsam sehe ich mein Projekt immer mehr Gestalt annehmen!
Also - hier sind ein paar Links die vielleicht für andere interessant sein könnten...
1. https://www.kexel.de/dlcbeschichtungen/ beim recherchieren bin ich auf DLC Beschichtungen gestoßen - weiß nicht wie teuer so ein Verfahren wäre oder wie das gewichtstechnisch eine Rolle spielt, meine Überlegung war damit "minderwertiges Metall" eventuell fester zu machen und gleichzeitig ein cooles schwarzes Finish zu erhalten.
2. https://www.research-collection.ethz.ch/handle/20.500.11850/146097 etwas kompliziert für mich aber auch durchaus interessant fand ich.
3. https://www.riobotz.com/riobotz-combot-tutorial Kennen hier bestimmt viele - ist von dem Erbauer von Minotor, seeeehr detailliert aber auch echt aufschlussreich finde ich.
4. https://rothauge.de das war die einzig "sympathische" Wasserstrahlfirma die mir zugesichert hat als Privatperson meine CAD´s in die Tat umzusetzten -> machen auch Laserstrahl glaube ich / vielleicht benutze ich lieber das...
Die Räder werde ich genau so machen denke ich - hört sich super an!
Ich hoffe ich schaffe es zum Event - ich denke auch ohne Roboter aufzukreuzen wird sich definitiv lohnen:)
Momentan bin ich noch auf der Suche nach Sponsoren, mal schauen wie das noch so läuft....
-
Hallo Alle zusammen ! Danke für den tollen Input. Ich hätte jetzt eure Tipps so verstanden dass ich meinen Bot mit vier Motoren also 2x dem Kit antreiben könnte? Mit Ketten zur Achse ist mir das mit zwei Motoren nämlich irgendwie heikel.
Dennoch bin ich neugierig: Runsler was hattest du mit diesen Hubmotoren vor und was waren deren Vorteile?
Hätte jetzt auch lieber den legendären IBF Regler drinnen - als irgendwas No-Name mäßiges. Aber ich kenne mich mit Reglern leider garnicht aus… hat IBF wirklich auch Regler für Brushless? Also für meinen Waffenmotor? Bzw. Kann ich da den Gleichen wie für den Antrieb nochmal benutzen?
Habe mir jetzt ein Wasserstrahl Unternehmen rausgesucht die mir Hardox nach den hoffentlich irgendwann mal fertigen CAD Designs schneiden können.
Zum Design nochmal:
Es war schon so geplant hinten am Bot eine Wedge zu bauen - allerdings könnte ich mir auch vorstellen vorne noch eine zu bauen oder so ein paar ,,Gabelstapler Zähne‘‘
Zudem überlege ich eventuell einen Asymetrischen Bar Spinner zu designen - ist anscheinend vom MOI effizienter -> was sagt ihr dazu?
Zu den Rädern: die HDPE Methode scheint ja Klassiker zu sein aber wie schafft ihr, dass die perfekt Rund sind?! Irgendwie mit einem Ring rausschmelzen? Ich habe so einen Bohrmaschinen Aufsatz aber perfekte Kreise bekommt der auch nicht hin… zudem wird das HDPE ja danach noch mit Reifenstreifen bestückt oder? Das kann doch dann garnicht wirklich Rundlaufen… meine Idee war es noch mit 3D Druck aus Tpu Reifen mit etwas Profil zu drucken oder kleine Skateboard rollen….
-

Habe ehrlich gesagt keine Ahnung ob das was taugt, aber hier gibt es ein komplettes Set:
Die Website scheint echt ganz cool zu sein! - Vielleicht bestelle ich das halt wirklich einfach direkt so..:)

Die Zeichnung sieht schon mal nicht schlecht aus. Allerdings denke ich, dass du etwas zu wenig Gewicht auf den Rädern haben könntest, und du dadurch nicht genug Grip hast. Bei Vertikalspinnern bevorzuge ich immer Vierradantrieb. Wenn du der Einfachheit halber lieber einen Zweiradantrieb bauen willst, muss der Bot recht kurz werden, so zum Beispiel:
Für den Fahrantrieb werden gerne Akkuschraubermotoren genommen, die sind inzwischen aber recht schwer günstig zu bekommen. Bei Bristol Bot Builders kann man Akkuschraubermotoren kaufen, allerdings muss man für den Versand aus England Zoll zahlen. Link Ansonsten gibt es noch die Option, Getriebe selber zu bauen.
Uhh Getriebe selber bauen klingt hardcore... Wahrscheinlich hast du Recht und Vierrad wäre viel besser! was haltet ihr von vier Bürstenmotoren und kleineren Rädern unter der Chassis?
-
Wenn ihr an der Stelle schon Ideen für Antriebsmotoren (Ich wäre jetzt instinktiv zu irgendwas mit Bürsten Gegangen weil das ja anscheinend easier zu regeln ist...) oder für den Waffenmotor (für die maximalen 1Kj) habt - immer her damit!:)
-
Vielen Dank Runsler !! Du scheinst ja echt ein Pro zu sein


Habe leider noch garnichts an Material - habe aber letztens erst ein Angebot für eine 2,4Ghz mit Empfänger dazu für rund 90€ entdeckt...