Servus Zusammen,
habe anhand eines Funktionsmuster meine aktuelle Bein Version einmal geprüft. ( Grobe Druckeinstellungen )

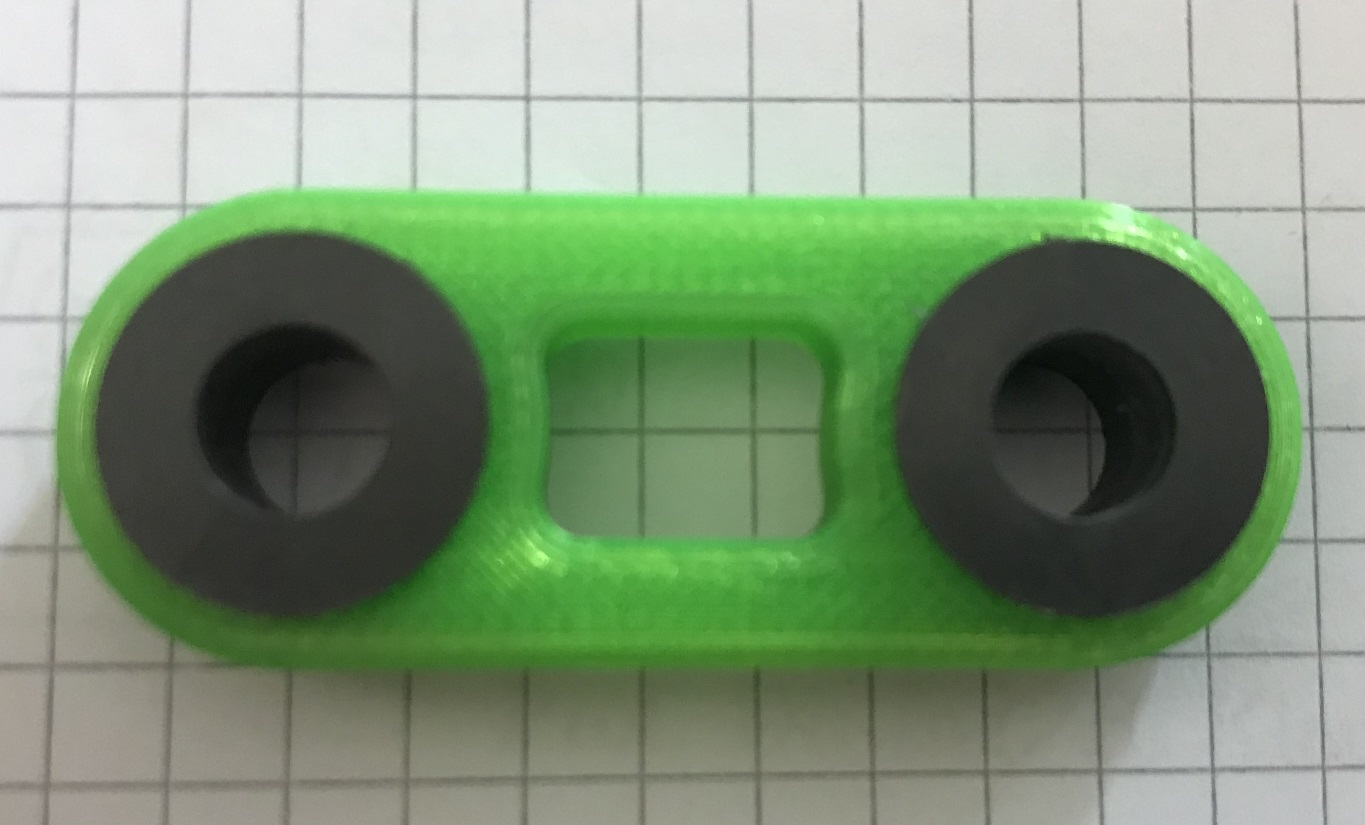
- Passungen müssen korrigiert werden (Gleitlager mit d=9mm passt in 9,3 - 9,4 mm Bohrung, möchte so wenig wie möglich nachbohren müssen)
- das Große "Schild" am Fuß kostet zu viel Gewicht (und verschwindet unter der Panzerung)
- Ein paar kleinere Änderungen am Bauteil um den 3D-Druck zu verbessern
Für den Prototypen werden 4 Laufsysteme verbaut. Ein Laufsystem besteht aus 1nem Getriebemotor, einem Gehäuse, 3 Beinen (Bein siehe oben in blau), Zahnräder, Zahnriemenscheiben...
Im folgenden möchte ich das ganze einmal aufschlüsseln. Das könnte ich auch still mit Excel machen aber so fällt euch vll. etwas auf.
------------------------------------------------------------------------
Gesamt = 3 Beine x 4 Seiten, Ich baue im Moment nur 1ne Seite, berechne jedoch für alle 4
Aktuelles Gewicht Gesamt: 372g
Aktuelle Kosten Gesamt: 45,12€
Aktuelle Anzahl Teile Gesamt: 228
Fortschritt Prototyp: 11%
----------------------------------------------------------------------------
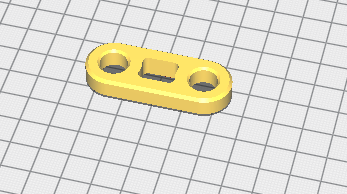
Prototypenteil Laufmechanismus 1, PLA, 80% Infill
Gewicht einzeln: 6g
Gewicht gesamt: 6g x 12 = 72g
Anzahl Pro Bein: 1
Kosten einzeln: 0,95€ (doch so viel)
- PLA: 6g = 0,15€
- IglidurG Gleitlager mit Bund: 0,20€ x 4 = 0,80€
Kosten gesamt: 0,95€ x 12 = 11,40€
Bauteile einzeln: 5
Bauteile Gesamt: 5 x 12 = 60
Arbeitsaufwand: gering
-------------------------------------------------------------------
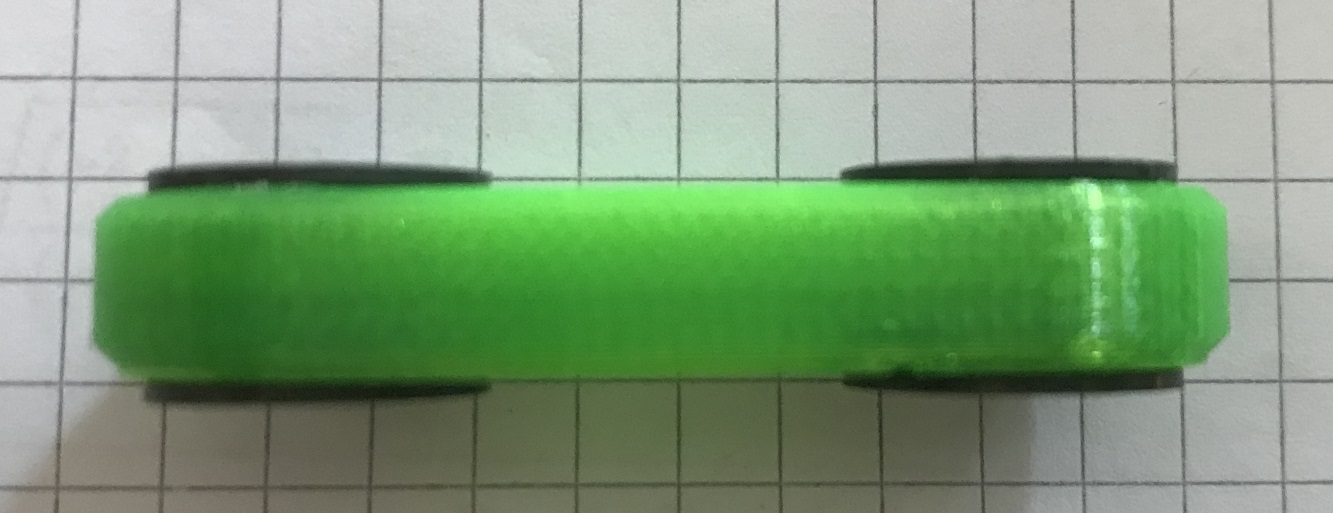
Prototypenteil Laufmechanismus 2, PLA, 80% Infill
Gewicht einzeln: 4g
Gewicht gesamt: 4g x 24 = 96g
Anzahl Pro Bein: 2
Kosten einzeln: 0,50€
- PLA: 4g = 0,10€
- IglidurG Gleitlager mit Bund: 0,20€ x 2 = 0,40€
Kosten gesamt: 0,50€ x 24 = 12,00€
Bauteile einzeln: 3
Bauteile Gesamt: 3 x 24 = 72
Arbeitsaufwand: gering



-------------------------------------------------------------------------
Prototypenteil Laufmechanismus 3, PLA, 80% Infill
Gewicht einzeln: 17g
Gewicht gesamt: 17g x 12 = 204g
Anzahl Pro Bein: 1
Kosten einzeln: 1,81€
- PLA: 14g = 0,35€
- IglidurG Gleitlager mit Bund: 0,20€ x 4 = 0,80€
- M4 Schraube mit Senkkopf: 0,04€ x 2 = 0,08€
- Alu Spacer 10mm: 0,58€
Kosten gesamt: 1,81€ x 12 = 21,72€
Bauteile einzeln: 8
Bauteile Gesamt: 8 x 12 = 96
Arbeitsaufwand: gering
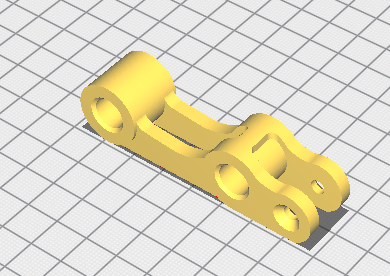
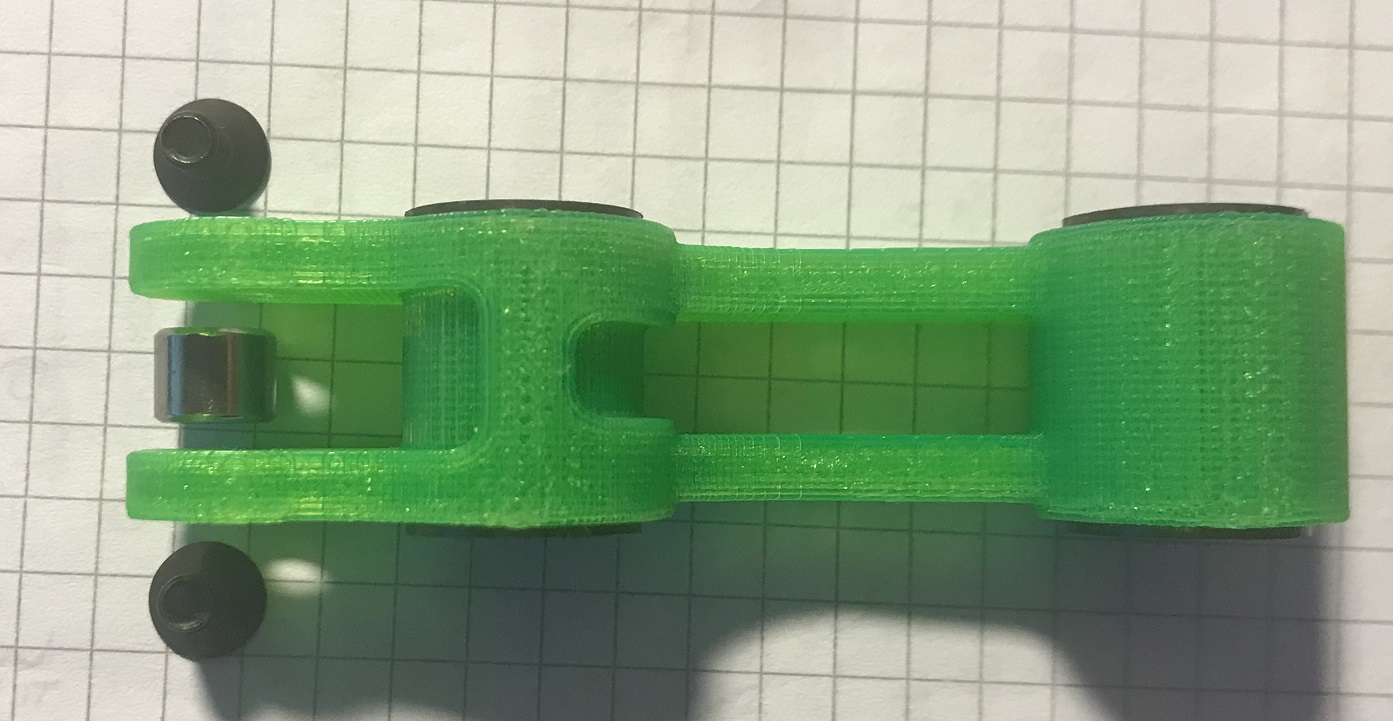
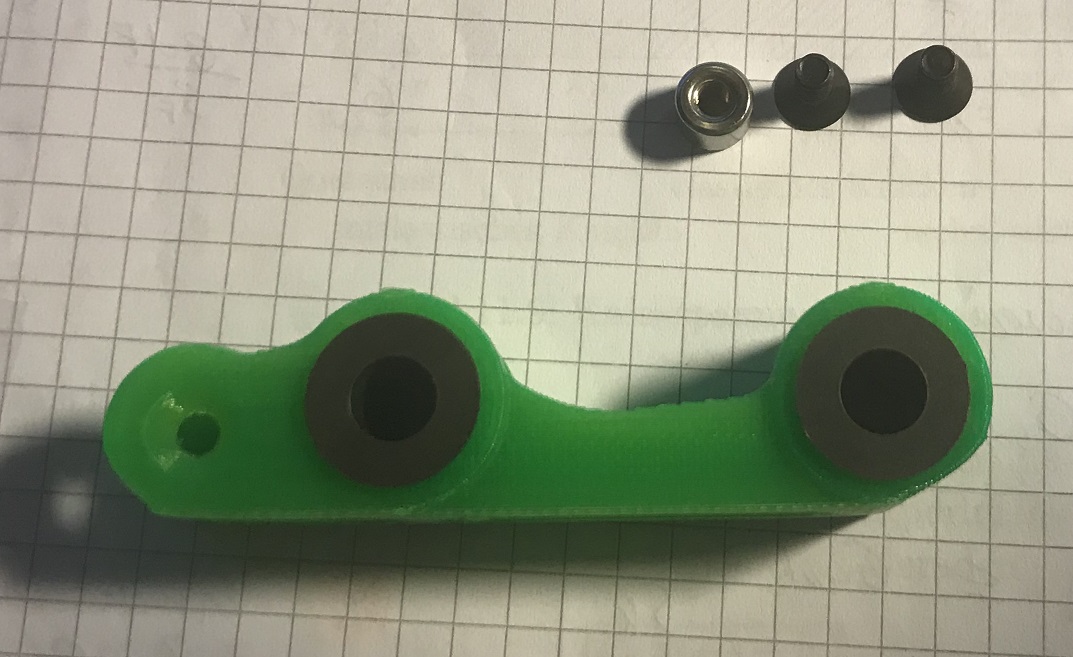
- Spacer + Schrauben sind noch nicht angekommen. Das auf dem Bild ist nur Ersatz.

