Da mein erster Roboter mittlerweile halbwegs fahrtauglich ist, ist es für mich an der Zeit, ihn vorzustellen.
Ursprünglich als Horizontalspinner mit Aluminiumrahmen geplant, wurde der Entwurf der Einfachheit halber zu einem Vertikalspinner abgeändert.
Mein Auge im Design lag auf die Defensive, weshalb ich mich entschied, eine komplette Stahlkonstuktion zu wählen
Das Fahrgestell besteht auf 1 bis 5mm dickem verschweißten Edelstahl. Dieses war die kostengünstigste Wahl und bietet hoffentlich genug Schutz gegen Spinner. Im Laufe des Baus haben sich immer mehr Schwachstellen gezeigt, sodass immer wieder spontan Veränderungen vorgenommen wurden. Die horizontalen Stangen auf der Oberseite waren ursprünglich gar nicht geplant, haben sich aber im Nachhinein sogar als extrem praktisch rausgestellt.
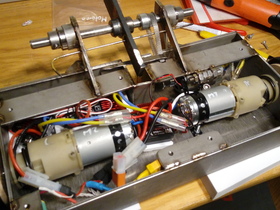
Als Antriebsmotoren wurden zwei 550er Motoren aus 12V Arebos-Akkuschraubern mitsamt der Getriebe genommen. Die Maße wurden ursprünglich ohne die Getriebe gemacht, sodass es ziemlich eng im Bot wurde, aber zum Glück passt es nun doch alles rein.
Die Fahrtregler für die Antriebsmotoren sind zwei Quicrun 1060 (vielen Dank für die Empfehlung!). Seitdem ich mich von den Carson Sirius 2max Reglern verabschiedet habe, ist der Bot auch fahrbar und bleibt nicht mehr als eine zuckende Box Stahl auf der Stelle stehen.
Der Empfänger und die Fernbedienung ist eine FlySky FS-I6.
Als Waffenmotor wird ein Reely 550 Motor mit einem Graupner Speed Profi 40R verwendet.
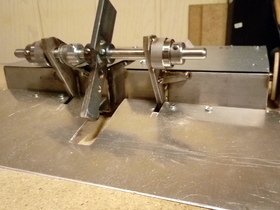
Das Besondere an dem Vertikalspinner ist, dass er eine umlaufende Achse verwendet. Der Grund ist, dass es zum Zeitpunkt der Herstellung die einfachste Variante war. Ursprünglich wurde die Achse einfach durch zwei Löcher gesteckt, mittlerweile sind aber zwei Kugellager hinzugekommen.
Die Form des Spinners hat sich über die Zeit verändert, erst war er aus Aluminium, danach hakenförmig und aktuell annähernd rechteckig. Eine dreizahnige Schwungscheibe ist auch vorhanden, aber noch in Nachbearbeitung.
Die rotierende Masse liegt bei etwa 370 Gramm, der Motor liefert 105W und erreicht bis zu 18000 U/min. Die Zahnriemenscheiben sind 15mm(Antrieb) und 20mm(Achse) groß, die Untersetzung beträgt 1,33.
Die Maße des Barspinners sind 30mm x 125mm x 4mm.
Vorne ist eine scharniergelagerte Wedge aus Aluminium angebracht.
Aktuell gibt es noch Probleme mit dem Waffenantrieb, da der Riemen zu locker läuft. Die Aufhängung des Motors ist zwar verstellbar, aber aufgrund des rechten Radmotors lässt er sich nicht ganz in die
Was noch in Arbeit ist:
- Stabilere, kürzere Wedgelets aus Aluminium
- Dachpanzerung gegen Hämmer, Sägen etc.
- Schwungscheibe
- Riemenspanner
Was noch geplant ist:
- Vernünftige Räder
- Seitenschutz
- Ersatzteile
- Barspinner mit schneidender Wirkung
Wärend der Bauzeit, die jetzt ziemlich genau ein Jahr beträgt, habe ich viel gelernt und es gibt vieles, dass ich bei meinem nächsten Bot anders machen würde. Nichtsdestotrotz bin ich froh, dass er funktionsfähig ist und ich hatte viel Freude an diesem Projekt und bedanke mich bei allen für die Tipps und Hilfe.