
 Alles anzeigen
Alles anzeigenmir fällt gerade ein, du könntest die Gegenrollen auch zu einer zweiten Antriebsrolle umfunktionieren.
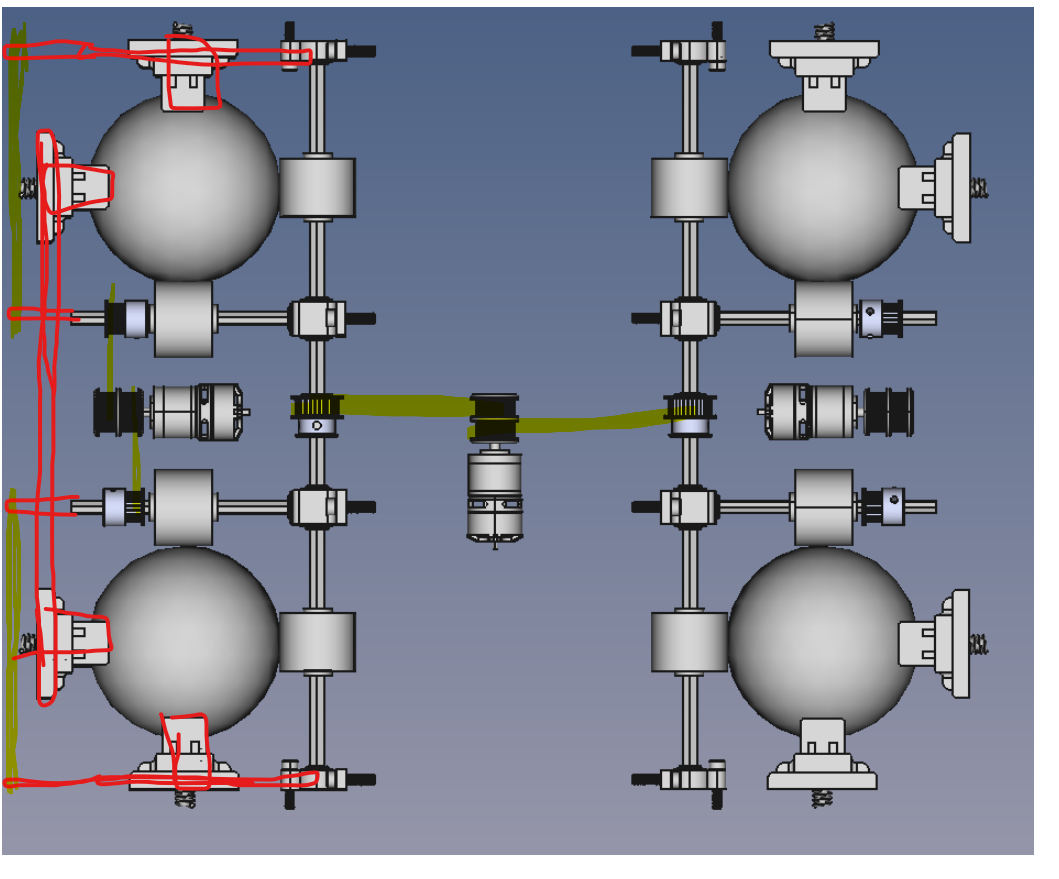
also, wenn 1 die Antriebsrolle ist, dann die 2 zur zweiten Antriebsrolle machen.
Hierzu müsstest Du lediglich die Gegenrollen, auch wieder auf eine Achse setzen, und dann über einen Riemen mitnehmen.
rot wären beispielhaft die Gestänge, und gelb die Riemen. Dann würden alle Rollen antreiben, und Du könntest dadurch die Rollen recht stramm andrücken.
Um die Vorspannung dann einstellen zu Können, wäre es toll, wenn man an je 2 von 4 der der Achsen über eine Stellschraube je Achsenbock die kpl. Achse verschieben könnte.
Erstmal richtig cool was da an Ideen von dir kommt und noch einmal Danke. Beim beantworten kamen bei mir direkt neue Lösungsansätze und Probleme auf, an die ich gar nicht gedacht hatte ![]()
Suchst du noch ein Team? ![]()
Um das "festhalten" mal vorweg zu adressieren... Ich habe einfach vergessen das Model der Top Transfer-Ball-Halterung in die Assembly in CAD einzufügen und war schon auf halben Weg die "einarmige" Anpressbacke zu designen.
Viele deiner Ideen hatte ich in der Art auch schon aber da ich schon mit meinen vorherigen Versuchen, wegen viel zu komplexer Teile, gescheitert war habe ich mir ein paar design Maximen gesetzt, die absolut nicht angefasst werden dürfen (damit ich keinen Feature-creep wie beim letzten Mal mit einbaue ![]()
![]()
1. es muss so simple wie möglich sein und so wenig mechanische/elektronische Teile beinhalten wie möglich.
2. es muss so stabil wie möglich sein ohne mit #1 in Konflikt zu geraten (für Beetleweight also einen mindest Impact auf das Chassi von 300 Joule oder mehr).
3. es muss hohen Grip, Torque und sehr hohe Geschwindigkeiten erzeugen können und der Grundlegende Strategie dienen.
4. Möglichst viele Wiederverwendbare Teile, in Modularen und leicht zu ersetzende Einheiten aufgeteilt sein.
(sprich wenn ein Drive kaputt geht muss man einfach nur einen Pulley abziehen, Schrauben lösen und das ganze Modul der Seite aus dem Chassi ziehen und ein neues Modul einsetzen können und das in weniger als 3 Minuten)
5. Es muss Regelkonform sein (Gewicht, Maße, etc...)
Wenn du dir das so durchliest, wirst du merken das es schon Sinn macht sich selbst ein paar Zügel anzulegen.
Deine Ideen (und jene die ich auch schon vorher hatte) würden für Redundanz im Alltag richtig Sinn machen aber dann käme pro Kugel ein nicht unsignifikanter Gewichtszuwachs (das fehlt dann beim Chassi und Panzerung) und mechanischer Teil hinzu der bei Impact auch einfach mal die Traktion zerstören oder behindern könnte, ein Nachteile den man beachten muss.
Ein weiteres Problem, welches ich aber derzeit der Einfachheit halber in kauf nehme, ist das aufgeben der Invertibilität des Bots durch einen Transfer Roller "oben" auf der Kugel. Das führt natürlich auch zu einem höheren Profil und man muss sich Gedanken über einen Selfrighting mechanism machen, welcher auch Gewicht beansprucht.
Das hier ist eine der verwendeten Transfer Units. Die werden dann per Pressfit in die 3D-gedruckte Anpressbacke eingefügt (konstante Lastaufnahme liegt bei 3,5kg also wird das schon was aushalten)
Hier wäre es ohne Sicherung der "Spitze". Die Anpressbacke ist angewinkelt um auch ein gewisse Haltekraft zu liefern. Mir ist aufgefallen, das diese Iteration der Anpressbacke nur bei einem Inverted Sinn macht und ich für einen non-inverted Bot die obere Transfer Roller Unit dann noch mehr zum Rechten Winkel der x-Achse der Kugel, planen sollte.
Für einen Inverted Bot müsste hier dann über und unterhalb der Traktionsrolle eine fixe Lagerung durch Transfer Roller vorhanden sein, was mehr Gewicht bedeuten würde aber ein niedrigeres Profil möglich macht. Bei einer Kugel mit 80mm Durchmesser komme ich auf eine minimale Höhe von 55mm beim Chassis (weniger Angriffsfläche), was aber auch eine Bodenfreiheit von 12,5 mm bedeuted.
Hier die Version mit Top Sicherung und nicht invertierbar. Die rechte Anpressbacke drückt permanent auf die Traktionsrolle auf und ist auch der Träger für die Top Sicherung, So bleibt die Lagerung von der Seite konstant. An der Seite sieht man den gedachten Aufbau. Eine Anpressbacke wird eingespart und die Kugel wird in einem Dreieck gelagert. Hinzu kommt dann je Traktionsrolle ein Transfer Roller um das "wegschlüpfen" nach unten zu verhindern, wenn der Bot abhebt. So wird (hoffentlich!!!) das gleiche erreicht, bei geringerem mechanischem und materiellem Aufwand aber es macht einen selfrighting Mechanismus nötig.
Prinzipiell, habe ich bis jetzt schon einmal richtig viel durch die Commuinty gelernt ![]()
Da ich den Drive als Modul plane, wird es bei Zeiten dann auch eine open-source Datei hierzu geben
Dickes Danke!