
Super! Danke für die Rückmeldung:) So ein Brushless Regler wäre natürlich schon sehr verlockend:)))

Projekt: GORUN
-
-
Ich habe berechnet etwa bis zu 4Kg für mein Waffensystem also 30% des Feathers zu benutzen. Bin grade noch auf der Suche nach Outrunner und Akkus und etwas lost. Habe in den Deutschen Onlineshops bisher irgendwie eher kleineres Zeug gefunden... Bin jetzt auf diesen hier gestoßen: https://alienpowersystem.com/shop/brushless-motors/63mm/aps-6374-outrunner-brushless-motor-170kv-3200w/
Meinung dazu?
-
 APS 6374 Outrunner brushless motor 170KV 3200WAPS 6374 Outrunner brushless motor 170KV 3200Walienpowersystem.com
APS 6374 Outrunner brushless motor 170KV 3200WAPS 6374 Outrunner brushless motor 170KV 3200Walienpowersystem.com -
-
- Offizieller Beitrag
Von Alien würde ich aus Persönlicher Erfahrung abraten, die Wicklungen sind für unsere Zwecke viel zu dünn, Turnigy Aerodrive SK3 wiederum ist ein guter Ansatz, die Wicklungen sind um einiges dicker, wo ich selber noch am Experimentieren bin ist der Richtige Controller, vielversprechend scheinen die Flipsky ESC zu sein, mehr wird das kommende Event Zeigen, https://flipsky.net/collections/electronic-products gute Motoren gibt es auch noch bei Maytech, https://maytech.cn/collections/sensored-motors , hier in Deutschland brauchst du nicht zu suchen, wir sind hier hoffnungslos verloren, es gibt keine Alternativen, die guten Motoren und ESC kommen einfach alle aus China, gerade hier in Deutschland gibt es nichts mehr!
Naja es gibt ausnahmen, https://tppower.de/ oder https://www.hacker-motor-shop.com/ aber machen wir uns nichts vor, selbst diese Firmen Produzieren in China!
Bei Akkus gehe ich ausschließlich auf SLS Akkus, die sind echt die Ausnahme und werden in Deutschland zusammen gebaut, da stimmt bisher einfach alles, von Beetle bis Heavy wird alles abgedeckt in bester Qualität zu einem Minimalen Preisaufschlag wenn man ohne Zoll Rechnet!
SLS LiPo Akkus für den RC-Modellbau - Lipo Modellbau Akkus bei Stefansliposhop online kaufen
-
Super vielen Dank!
Der hier scheint mir Ideal - damit dürften die 1Kj kein Problem sein oder?
 In Stock Brushless 6355 Unsealed Motor 8mm Shaft Sensored 170KVMaytech Brushless 6355 170KV Open Cover Outrunner Sensored Motor for Esk8/E-bike/Robots/Mountainboard/E-scooter Model No MTO6355-HA KV 170 Idle Current 1A…maytech.cn
In Stock Brushless 6355 Unsealed Motor 8mm Shaft Sensored 170KVMaytech Brushless 6355 170KV Open Cover Outrunner Sensored Motor for Esk8/E-bike/Robots/Mountainboard/E-scooter Model No MTO6355-HA KV 170 Idle Current 1A…maytech.cn -
- Offizieller Beitrag
Ja der reicht locker, die Motoren sind ja normalerweise für e-scotter gedacht, für Feather reicht das alle mal!
-
Danke für die tollen Ratschläge. Hab mich mittlerweile für den hier entschieden - da Lieferung aus Deutschland 🤪
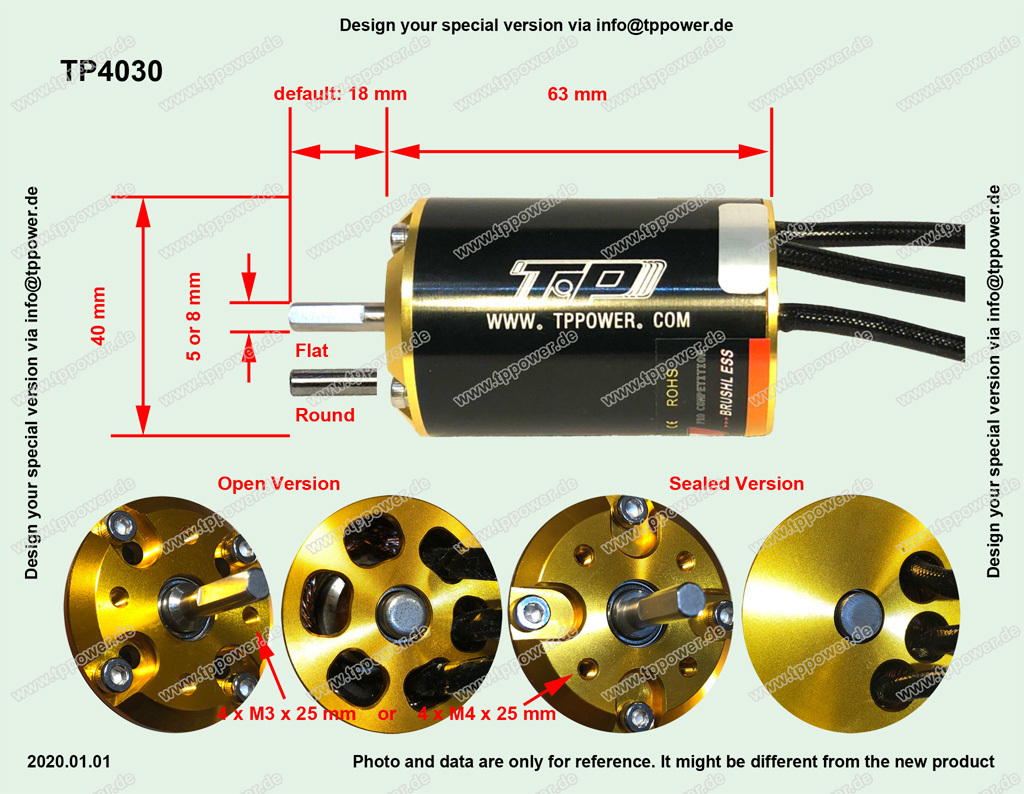 TP4030-2750KV-Open-5Ftppower.de
TP4030-2750KV-Open-5Ftppower.de -
- Offizieller Beitrag
6455 und 4030 ist aber ein gewaltiger Unterschied, da bist du dann schon fast in der Raptor Klasse!
Zumal das eine ein Outrunner ist und der andere ein Innrunner!
-
Ohh - du hast absolut Recht! da habe ich irgendwie nur auf die Leistung geschaut und mich über die Masse gewundert 💀
Hast du eine Featherspinner Empfehlung von TP? eher Richtung TP5600?
-
- Offizieller Beitrag
Lass dich da mal nicht täuschen, die Motoren kommen aus China und werden erst gefertigt wenn du Bestellst, eigene Erfahrung, und die Preise sind zuzüglich Mehrwertsteuer und zuzüglich Versand auch da bitte Rechnen, die Kosten nehmen sich nicht viel!
Was mich auch wundert oben suchst du einem Motor mit 170Kv und unten mit 2750Kv allein das sind Welten hier muß in beiden Fällen eine Untersetzung dazwischen um auf 1Kj zu kommen, je nach dem wie hoch deine Spinner Masse ist!
-
Jup IceMaster - du hast Recht da ist ein Unterschied 🤣 ich kenne mich leider mit BL einfach nicht richtig aus - dachte vorallem die Leistung sei entscheidend… Ich denke ich muss jetzt erstmal ein finales CAD Design meiner Waffe machen und dann entscheiden.
-
- Offizieller Beitrag
Der Richtige Weg wäre erst mal die Waffe Fertig zu Zeichnen, dann ausrechnen wie viele Umdrehungen pro Minute nötig sind um 1 KJ zu erreichen, dann wäre wichtig zu entscheiden welchen Antrieb fürs Fahren du verwenden willst, damit du Festlegen kannst wie viel LiPo´s in deinen Bot kommen 4S, 5S, 6S oder noch mehr, daraus ergeben sich dann die Volts in deinen Bot, bei 6S x 4,2V bist du bei Maximalen 25,2V im Bot, dann kannst du daraus die U/min auf deine Motor Wahl ableiten KV bei Brushless bedeutet Umdrehungen pro Volt, gehen wir von Obigen Beispiel aus 170KV x 25,2V machen 4.284 U/min oder beim zweiten Beispiel 2750KV x 25,2V machen 69.300 U/min, was auch zu beachten ist, dein zweiter Raus gesuchter Motor macht nur Max Volt (V): 21,8 V also Maximal 5S und wenn wir davon ausgehen das du ca. 3.000 U/min brauchst für 1KJ nur als Beispiel, beim ersten Motor kaum Untersetzen der läuft da sehr na dran, da kann man gut mit der Elektronik Drosseln, aber beim zweiten Motor wäre schon eine Untersetzung nötig von gut 1:23, das macht bei einem Spinner kaum Sinn, weil Schläge dann alle von Getriebe Absorbiert werden müssen!
-
Kann mir jemand nochmal den Discord Link geben? Der eine der geposted wurde funktioniert nicht...
-
Vielen Dank IceMaster !!
-
- Offizieller Beitrag
Kann mir jemand nochmal den Discord Link geben? Der eine der geposted wurde funktioniert nicht...
 Join the European combat robot builders Discord Server!Check out the European combat robot builders community on Discord - hang out with 86 other members and enjoy free voice and text chat.discord.gg
Join the European combat robot builders Discord Server!Check out the European combat robot builders community on Discord - hang out with 86 other members and enjoy free voice and text chat.discord.ggDer Link funktioniert soweit ich weiß immer nur für eine begrenzte Zeit, daher kann der schnell mal "abgelaufen" sein.
-
Vielen Dank!
Wann gehts den los am Samstag? Muss grade ein bisschen meine Anreise planen...
Kleines Update:
Habe mich noch weiter mit Onshape vertraut gemacht, Habe mich ein bisschen verkünstelt mit vertikalen Spinner Designs.. Überlege jetzt ein schon designtes asymmetrisches Ding von JustCuz Robotics zu übernehmen: hat einen ganz guten MOI und auch Mega Bite durch nur einen Zahn denke ich. Trotz langer Recherche überfordert mich die ganze Spinnergeschichte doch noch ziemlich (auch mit eventuell notwendigem CNC, Stabiler Welle, V-Riemen und was sonst noch alles...)
Mein Plan ist es, wie auch schon von vielen angemerkt erstmal einen "fahrbaren Untersatz" fertig zu stellen. Meine Idee war es jetzt eher dünne Stahlrohre oder Vierkant Rohre für die Chassis mit einem Schweißer Kumpel zu verschweißen. Dann war die Idee einfach Hardox 3-4mm raufzuschrauben. Hab das Cad da noch nicht fertig muss mal gucken wegen Gewicht. Als Bodenplatte wollte ich eine schön dicke HDPE Platte nehmen um alles da dran schrauben zu können. Oben eventuell Pc.
Probleme Momentan:
- Es zeigt sich das die Getriebemotoren nicht einwandfrei funktionieren, klemmen oft beim Anfahren und gehen meist erst wenn man ihnen schnell viel Power gibt.. Habe mal das Getriebe zerlegt und neu gefettet - teste die nochmal morgen.
- Ich bin mir nicht sicher wie groß ich die Räder machen soll. Denke ich werde schon die invertierter Linie gehen und die Größer als den Bot machen aber wie groß genau - ka...Irgendwelche Ideen? Wie entscheidet ihr sowas?
-
- Offizieller Beitrag
Für einen Feather kannst du wahrscheinlich stellenweise auch eher 6mm Hardox nehmen (insbesondere unbewaffnet), je nachdem wie es hinhaut. Aber die Dicke im CAD auszuprobieren ist ja eine Kleinigkeit wenn der Plan ansonsten steht.
Denk unbedingt daran die Schraubenlöcher im CAD anzulegen bevor es geschnitten wird, Hardox bohren macht keinen Spaß.
Radgröße... naja, meine beiden einzigen aktiven Bots fallen da sehr aus der Norm (gigantische bzw. garkeine Räder), und der einzige andere ist auf seiner eigenen Waffe gestrandet, also bin ich da nicht so ein tolles Beispiel.
Aber generell würde ich erstmal die Innereien (Akku, Regler, Motoren etc.) ein bisschen Tetris-mäßig herumschieben und schauen welche Anordnung mir für den Bot sinnvoll erscheint.
-
- Offizieller Beitrag
Wann gehts den los am Samstag?
 INTERMODELLBAU | Messe Dortmund | Programm HighlightsWir freuen uns, dass du bei der INTERMODELLBAU als Besucher dabei bist. Alle wichtigen Informationen findest du auf dieser Seite.www.intermodellbau.de
INTERMODELLBAU | Messe Dortmund | Programm HighlightsWir freuen uns, dass du bei der INTERMODELLBAU als Besucher dabei bist. Alle wichtigen Informationen findest du auf dieser Seite.www.intermodellbau.de -
Danke finger.im.ohr

Für einen Feather kannst du wahrscheinlich stellenweise auch eher 6mm Hardox nehmen (insbesondere unbewaffnet), je nachdem wie es hinhaut. Aber die Dicke im CAD auszuprobieren ist ja eine Kleinigkeit wenn der Plan ansonsten steht.
Denk unbedingt daran die Schraubenlöcher im CAD anzulegen bevor es geschnitten wird, Hardox bohren macht keinen Spaß.
Wird gemacht!:)
Noch jemand eine Idee wegen Räder-Durchmesser? Sonst gehe ich da wirklich empirisch dran denke ich
-