
- Offizieller Beitrag
Genau. Aber der Akku soll ja schön groß werden. Der bleibt auf jeden Fall.
Mal schauen. Vllt werden es 200g

Genau. Aber der Akku soll ja schön groß werden. Der bleibt auf jeden Fall.
Mal schauen. Vllt werden es 200g
Ich hätte jetzt gesagt zu Mitmachzwecken lieber etwas schwerer und dafür stabiler insgesamt. Auch beim Gehäuse. bevor da Schäden vom in-die-grube-fallen repariert werden müssen...
Aber spannend das es tatsächlich (fast) machbar wäre definitiv, und als Herausforderung interessant
och ne, danke. Bei Elektronik bin ich froh, auf fertige Module zurückgreifen zu können. ![]()
Nur so als gimmick falls man doch platz braucht ![]()
Ich bin selbst wegen den brushed esc am fluchen und habe für mein Raptor-projekt ein paar open-source Varianten rausgesucht um den RX, BEC und ATMega zum ansteuern der Motoren auf ein Power distro board zu kriegen. Da bin ich drauf gestoßen und dachte ich poste es mal. Kommt beim Ant ja eh auf jedes Gramm an. Den Arduino Nano und konsorten kann man ja auch als barebone Variante selber bauen und flashen ![]()
Der code ist bidirectional und ich teste ihn gerade mit einem 40A motor driver. Sollte für ant auch interessant sein. Man spart sich schon ein ganzes board
Habe etwas herumüberlegt, wie der Bot aussehen könnte:
S: Servo
A: Akku
M: Motor
Dazwischen der Arduino auf dem ESC.
Hm, sollten es nur zwei Räder werden fürchte ich das sieht etwas frontlastig aus, gerade mit dem Akku auch vorne. Dazu wäre für den Heber hecklastig evt besser.
Aber andererseits kann ich das Gewicht der Einzelkomponenten und den Schwerpunkt immer echt schlecht schätzen.
Alles anzeigenHabe etwas herumüberlegt, wie der Bot aussehen könnte:
S: Servo
A: Akku
M: Motor
Dazwischen der Arduino auf dem ESC.
Ich glaube, die Ladebuchse ist bei Dir immer dreipolig und auf der Unterseite? => Wäre also noch Platz links von Ardu.
Ein-/Ausschalter? => könnte eventuell gleich oberhalb von der Ladebuchse drauf?
Der Akku wird flach hingelegt? Dann müsstest Du wohl noch irgendwo ein paar Millimeter an der Ecke des Akkus mit dazu-improvisieren, damit die Akku-Drähte nicht an den Ardu andrücken. (?)
Mir gefällt sehr gut die seitliche Anbringung vom Heber, direkt am Servo. ![]()
![]()
![]()
Die Kästen im CAD sind alle etwas größer als die eigentlichen Komponenten, sodass etwas Platz für Kabel eingeplant ist.
Außerdem tendiere ich derzeit dazu, nicht exakt passende Aussparungen zu schaffen. Die Kästen im CAD Bild werden also keine geometrischen Elemente des Chassis, sondern dienen nur der Planung.
Schalter und Ladebuchse habe ich bisher noch gar nicht eingeplant, aber der restliche freie Platz sollte ausreichend sein.
Ich bin noch unsicher, welche Art von Ladestecker ich nutzen werde.
Außerdem soll die USB Buchse vom arduino zugänglich sein, um die Software aktualisieren zu können.
Räder und Schwerpunkt des Bots:
Ein Fehler, den ich immer wieder begehen. In diesem Fall bin ich nicht sicher, ob die Sorge berechtigt ist. Der Bot ist insgesamt nicht sehr lang. Ich werde trotzdem überlegen, ob ich den Akku weiter nach hinten bringe.
Vielleicht nacht es Sinn, alles testweise mal auf eine Platte zu packen um zu schauen wie es sich fährt.
Ich denke fahren lassen sollte er sich schon, aber wohl nicht mehr mit noch einem anderen Bot auf dem Heber drauf...
Akku nach hinten gepackt. Fährt sich gut.
Kennst du den hier schon?
Nano Klon mit integriertem NRF24L01+ für 11,95€
Da ist sogar netterweise ein "echtes" Datenblatt mit dabei und man spart sich eine ganze Platine (externe Spannung 7-12V)
und hier noch einmal der Motor Treiber TB6612FNG für 6,50€
oh das ist cool. Vor allem spare ich mir das friemelige gelötet.
oh das ist cool. Vor allem spare ich mir das friemelige gelötet.
vor allem komme ich bei dem ganzen auf 11g inklusive motor driver ![]() das ist schon echt ne Ansage bei Ants
das ist schon echt ne Ansage bei Ants
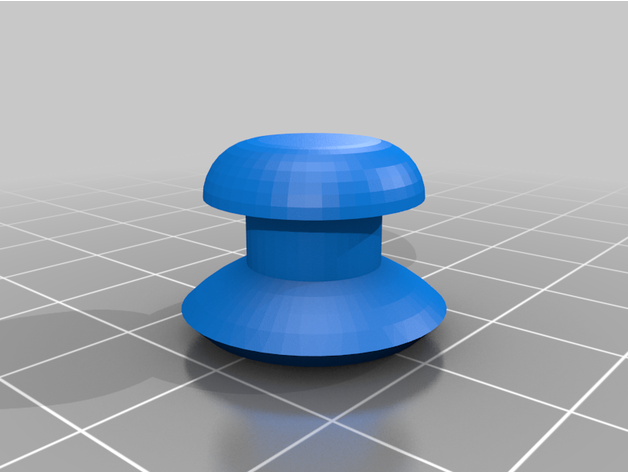
Habe einen Controller "Knüppel" gedruckt:
Habe ich auch direkt auf Thingyverse hochgeladen:
Habe am Chassis etwas weiter gemacht.
Ich denke ich werde die Teile von der Unterseite montieren, sodass es von oben schön sauber aussieht.
Die Motoren werden durch Führungskanten positioniert und dann mit Kabelbindern gehalten:
Außerdem habe ich festgestellt, dass die Schaufel viel länger sein darf. Die Abmaße 10x10x10 cm³ kann ich ja auch bei gehobener Schaufel erfüllen.

Nano Klon mit integriertem NRF24L01+ für 11,95€
Hab ich mir auch mal bestellt. Kommt leider mit bereits verlöteter Stiftleiste an...
Ich spare mir den Aufwand, den NRF zu verkabeln, muss dafür aber die Stiftleiste runter löten. Weiß nicht ob das ein wirklicher Zeitgewinn ist. ![]()
Evtl habe ich genug Platz, um dir Stiftleiste dran zu lassen, aber der Sinn dieser Kombi Variante war es ja, Platz zu sparen.
Yup... meine über Eckstein bestellten sind auch gerade eingetrudelt und ich war etwas entsetzt. Entlöten geht auch nicht so einfach bei denen ![]()
Ich habe nun an der Fernsteuerung einen Poti hinzugefügt, der das gesendete Signal für die Antriebskanäle trimmt und dadurch die Geschwindigkeit des Bots einstellbar macht.
Die N10 Motoren (1000 rpm laut spec) mit den großen Rädern sind knackig schnell. Mir gefällt das, aber der ein oder andere Anfänger mag damit überfordert sein.
Leider nichts, was man hier großartig mit Bildern zeigen könnte...
Das Chassis hat Platz für einen An/Aus-Schalter und die Spannungsanzeige bekommen. Da ich das Chassis aus transparentem PP drucken werde, liegt die Spannungsanzeige unter einer dünnen Schicht Material. Sie sollte stark genug sein, um hindurch scheinen zu können. Evtl. muss ich ein wenig mit der Materialstärke experimentieren.