
- Offizieller Beitrag
Hatte der mir auch die Speichen zerfetzt?
Ich muss mal die Videos schauen. Kann mich gar nicht mehr so recht erinnern. Die letzten Events sind schon sooooo lange her...

Hatte der mir auch die Speichen zerfetzt?
Ich muss mal die Videos schauen. Kann mich gar nicht mehr so recht erinnern. Die letzten Events sind schon sooooo lange her...
Runde 1: https://www.youtube.com/watch?v=TQ_djeurZfE ab 13:05 (Beserk´s Shadow)
Runde 2: https://www.youtube.com/watch?v=irySbl6fEAQ ab 1:30 (Little Beserk)
Runde 3: https://www.youtube.com/watch?v=2YXB1jyiLpE ab 7:41 (Anubis)
Runde 4: https://www.youtube.com/watch?v=rJoCSACunGQ ab 6:50 (Jalapeno)
Runde 5: https://www.youtube.com/watch?v=AQvVVPJ39-Q&t ab 11:13 (Freya)
Runde 6: Nicht mehr dabei...
Zurück zum eigentlichen Thema....
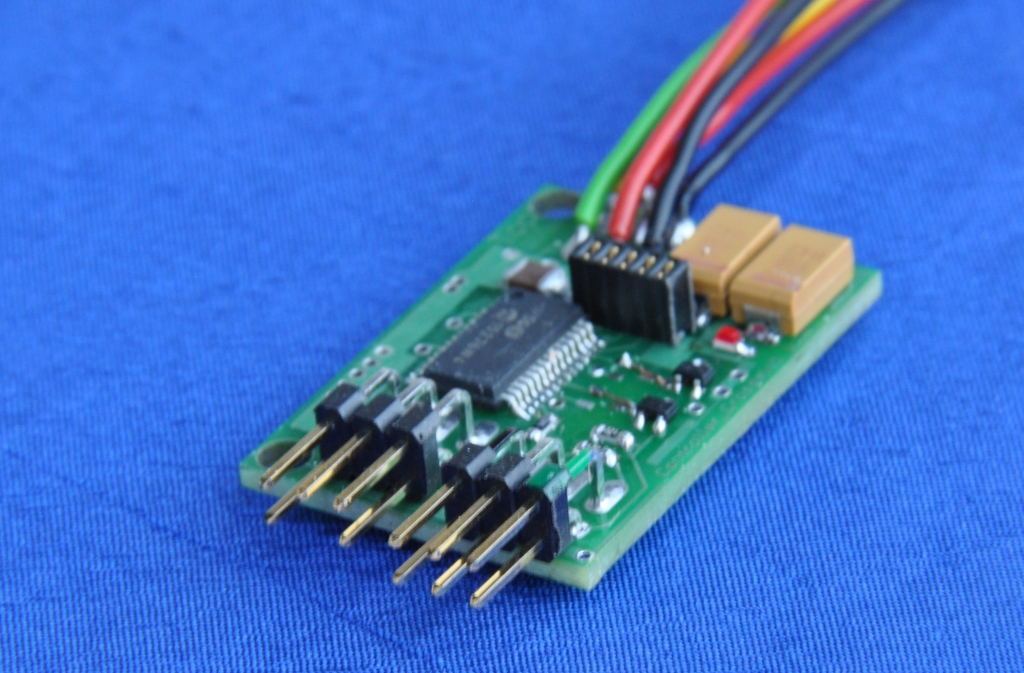
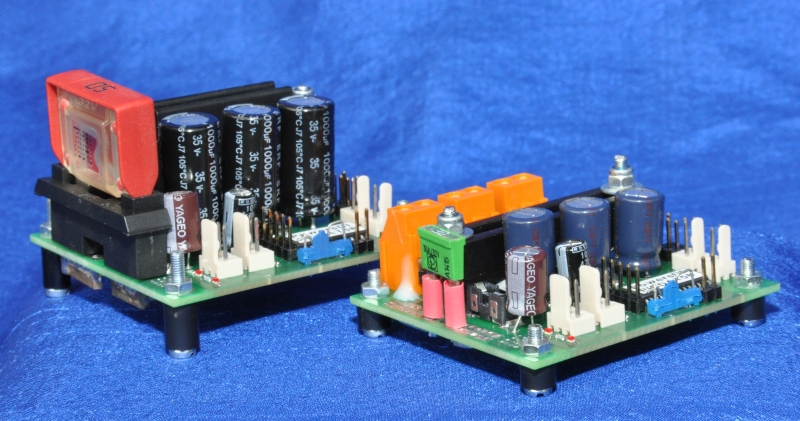
Die ersten Baugruppen sind fertig und werden morgen versendet.
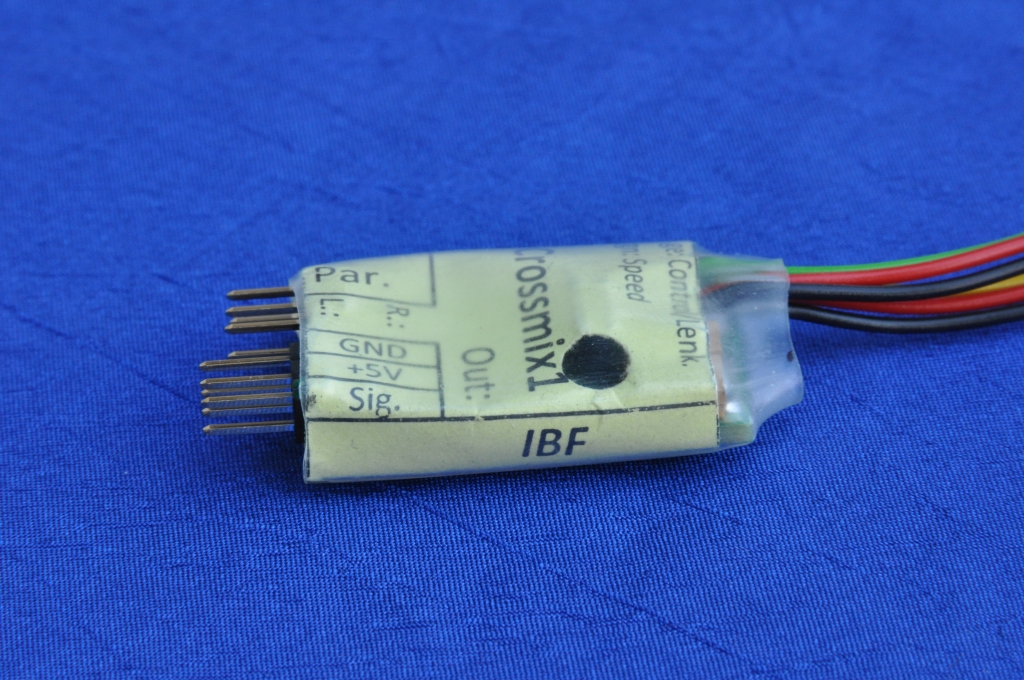
Die hintere Stiftleiste ist mit Absicht etwas zurückgesetzt. Damit ist auch in einem etwas "verbautem" Montagezustand eine Unterscheidung zwischen den Signalausgängen und den Parametereingängen gegeben.

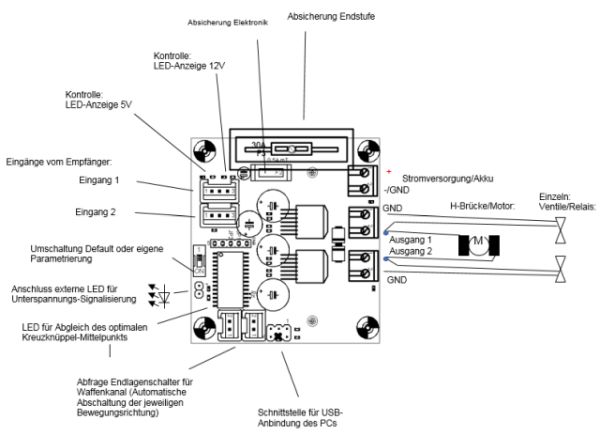
Die beiden Kabel werden am Empfänger aufgesteckt.
Die linke Stiftleiste ist zum Anstecken des USB-Konverters, damit der Controller parametriert werden kann.
Die rechte Stiftleiste ist der Ausgang. Hier wird die Verbindung zum Fahrtregler hergestellt.
Anordnung: Obere Stiftleiste: rechter Motor ; Untere Stiftleiste: linker Motor ; von links nach rechts: GND, +5V, Signal
Die Parametrierungen sind im neuen PC-Programm hinterlegt:
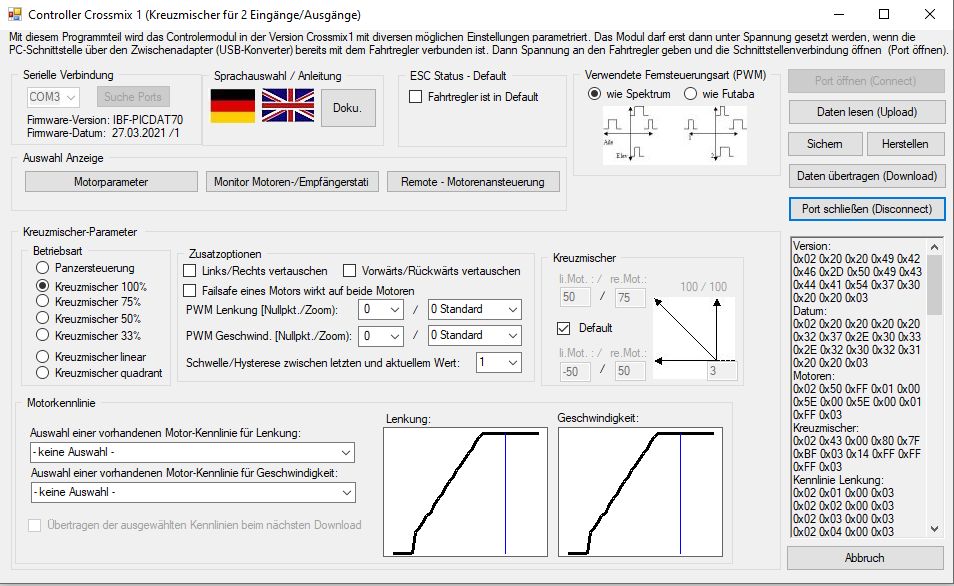
Bei der Betriebsart sind die üblichen Standard-Kreuzmischerfunktionen mit anteiligem Lenkeinschlag (100% bis 33%) vorhanden. Wie im Intro dieses Threads schon erwähnt, sind dann die beiden Berechnungen über Geradengleichungen hinterlegt. Der lineare Lenkungsverlauf bevorzugt für die vierrädigen Bots, der quadrantenweise Lenkungsverlauf für die zweirädigen Bots.
Dem aufmerksamen Leser ist aufgefallen, dass es auch eine "Panzersteuerung" gibt. ![]() Erscheint auf den ersten Blick unsinnig, denn die beiden Fahrtregler einfach auf den Empfänger aufgesteckt, schon wäre das die Panzersteuerung. Dazu aber gleich bei den Zusatzoptionen mehr....
Erscheint auf den ersten Blick unsinnig, denn die beiden Fahrtregler einfach auf den Empfänger aufgesteckt, schon wäre das die Panzersteuerung. Dazu aber gleich bei den Zusatzoptionen mehr....
Zusatzoptionen:
Daneben gibt es eine einfache Möglichkeit, die Eingänge zu tauschen. Und natürlich die Option, dass der Failsafe-Alarm von einem Kanal auch gleichzeitig den zweiten Kanal in den Default-Zustand versetzt.
Mit der Einstellung "Panzersteuerung" werden die Eingangssignale nicht zu einer Kreuzmischerfunktion durchgeleitet, sondern nur "bearbeitet" und dann wieder ausgegeben. Unter der Bearbeitung ist dabei z.B. das Verstellen des Nullpunkts möglich. Und es gibt die Zoom-Funktion. Damit kann das PWM-Signal z.B. von 1.0 bis 2.0ms auf 0.8ms bis 2.8ms gestreched werden. Somit ist es nun möglich, zwei Servos anzuschließen, die einen wesentlich größeren Stellwinkel haben. (Hat zumindest mit meinen Conrad- und Hobbyking-Servos so funktioniert.
Durch das Zoomen des Signals werden leider auch die Störungen mit verstärkt. Der Servo kann dann "zittern". Um das zu unterdrücken, ist jetzt eine einstellbare Hysterese vorhanden. Das aktuelle Ausgangssignal wird erst dann geändert, wenn das neue Signal mindestens diese Schwelle überstiegen hat.
Eine Neuheit ist, dass es sowohl für die Geschwindigkeit als auch für das Lenkverhalten zwei getrennte Kennlinien geben kann. Auf die Idee hat mich Jojo gebracht. Er wollte eine Exponentialfunktion. Ich bin davon ausgegangen, dass das bei der Geschwindigkeit sein muss. Oder bei der Lenkung? ![]() Jedenfalls kann sich das in Zukunft jeder selber einstellen, wie er es braucht. Also bei der Geschwindigkeit eine Exponentialfunktion, während die Lenkung sehr feinfühlig reagiert und erst zum Schluss ziemlich zackig die Haken setzt.
Jedenfalls kann sich das in Zukunft jeder selber einstellen, wie er es braucht. Also bei der Geschwindigkeit eine Exponentialfunktion, während die Lenkung sehr feinfühlig reagiert und erst zum Schluss ziemlich zackig die Haken setzt. ![]()
Das Thema mit den zwei Kennlinien und der Überlagerung von dem PWM-Zoom hat mir ziemlich viel an Zeit gekostet. Sind zwei Beeinflussungen, die sich immer gestört haben. Aber jetzt, wo die PWM nur ganz zum Schluss greift und nicht am Anfang schon das Signal vermischt, ist es ganz durchschaubar geworden.
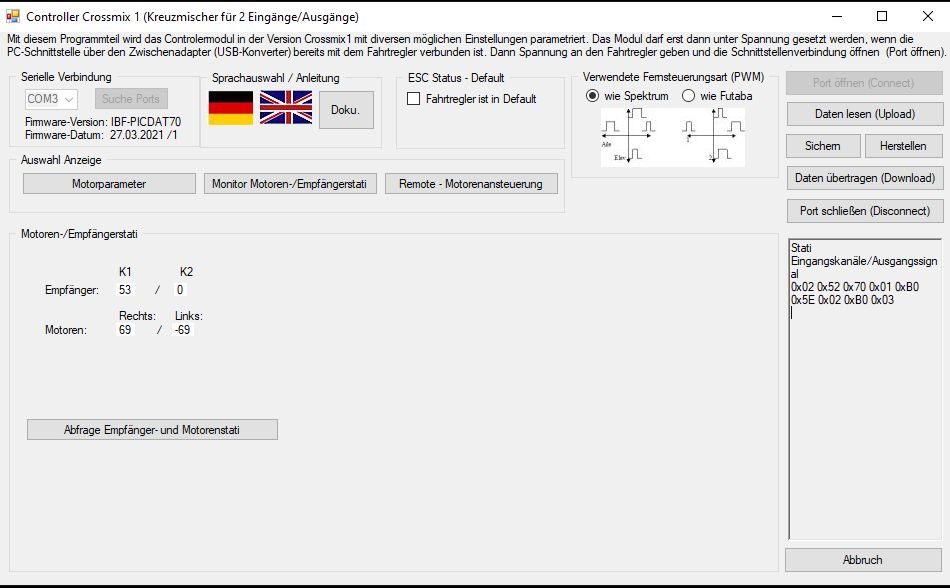
Selbstverständlich gibt es auch wieder einen Datenmonitor. Damit werden sowohl die zwei Eingangssignale erfasst und angezeigt, als auch die ausgegebenen PWM-Signale. Durch das Zoomen der PWM ist jetzt auch mehr als 100% möglich....
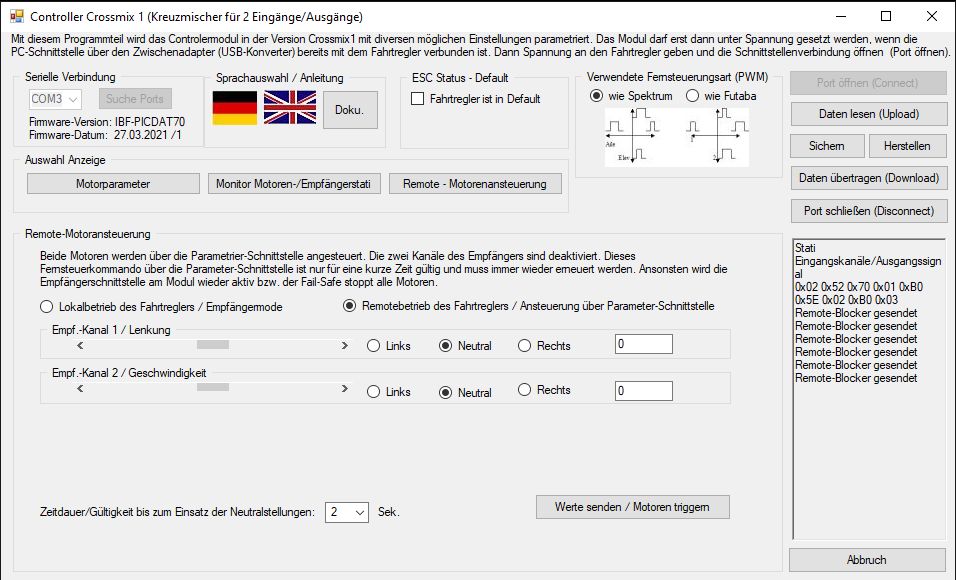
Und zum Schluss dann noch der Remote-Betrieb. Durch den aktiven Remote-Betrieb werden die zwei Eingänge vom Empfänger abgekoppelt und der PC steuert die zwei Ausgänge.
Im Unterschied zu der früheren Realisierung ist das jetzt ein 100%-Remote. Es gibt die Einstellung für die Zeitdauer/Gültigkeit. Das ist die Zeitdauer für die Einstellung, die man mit den zwei Slidern vorgegeben hat. Ist diese Zeit vorbei, dann sendet der PC kontinuierlich "Neutralstellung" an das Modul. Die Empfängerkanäle sind deshalb auch weiterhin lahmgelegt. (Früher war das anders, nach der eingestellten Zeit waren die Empfänger wieder aktiv.)
Erst wenn in diesem Menü von "Remotebetrieb" wieder auf "Lokalbetrieb" umgeschaltet wird, werden die Empfängerkanäle wieder aktiviert.
Wie immer: Es handelt sich hier um die ersten Entwicklungsmuster. In der Software können noch Fehler sein. Wem etwas auffällt, bitte nicht hinter meinem Rücken schimpfen, sondern einfach melden. Am Besten mit einer Beschreibung, wie man den Fehler nachvollziehen kann.
Das neue PC-Programm ist unter Visual-Studio von Microsoft entstanden. Sehr viele Unterschiede zu meiner bisherigen Programmiersprache bzw. -dialekt. Da kämpfe ich immer noch um das nachstellen zu können, was früher mit einem einzigen Befehl realisiert werden konnte.
Aktuell bekannt:
- Die Motorkennlinien müssen manuell heruntergeladen und auf dem PC in ein bestimmtes Verzeichnis kopiert werden.
- Es gibt keine Kontrollmöglichkeit für mich, zu überprüfen, ob der Treiber für den USB-Konverter schon installiert wurde.
Soweit mal..... Fragen? Vorschläge? Kritik? Kein Interesse? Brauche ich nicht? Gibt's aus China billiger?
PyroBots: nachdem sich die Servos bei den Tests mit einer stärkeren Versorgungsspannung ganz gesittet verhalten haben, kriegst Du jetzt doch die ganze Bestellung in einem Paket geliefert. Hab' auch das Musterteil für den 3D-Druck mit dazugelegt. ![]()
@BB-Dirk: Auch Dein Exemplar geht morgen in den Briefkasten.
Sieht hochinteressant aus und wird für zukünftige Bauten definitiv im Kopf behalten.
super Reiner freue mich schon drauf
Hab' noch ein Feature von dem Modul vergessen zu erwähnen:
Es befindet sich ein eigener Spannungskonstanter auf dem Modul, das nur für die Versorgung des eigenen Microcontrollers und des ICs da ist.
Nachdem einige von euch immer gerne "Grenzen überschreiten" und deshalb auch mal 2S-Akkus eiskalt auf Empfänger oder Servos gehängt werden, ist das Kreuzmischermodul vorsichtshalber von mir schon mal dafür imun gesetzt worden. ![]()
Der LOD-Spannungskonstanter kostet zwar das dreifache im Vergleich zu einem normalen Spannungskonstanter (.... oder wenn man ihn ganz weglassen würde....) aber das ist die Sache wert.
Der Low-Drop-Spannungskonstanter braucht nur minimal 5V und schon funktioniert alles. Es könnten auch bis zu 16V angelegt werden. Aber das wäre garantiert nicht kompatibel mit den handelsüblichen Empfängern. ![]() Die angelegte Versorgungsspannung vom Fahrtregler wird 1:1 zum Empfänger durchgeleitet. Servos etc. können also ganz normal dort angesteckt werden.
Die angelegte Versorgungsspannung vom Fahrtregler wird 1:1 zum Empfänger durchgeleitet. Servos etc. können also ganz normal dort angesteckt werden.
und deshalb auch mal 2S-Akkus eiskalt auf Empfänger
haha, wer würde denn so etwas machen ![]()
![]()
![]()
Ich. ![]()
2s fähige Empfänger sind inzwischen quasi Standard und es gibt auch zahlreiche für 2s spezifizierte Servos.
Ich.
... Ich wusste es... ![]()
2s fähige Empfänger sind inzwischen quasi Standard und es gibt auch zahlreiche für 2s spezifizierte Servos.
Das wird immer geschrieben. Aber irgendwie habe ich meine Zweifel, ob die höhere Spannung in den Geräten "sauber" gelöst ist. Elektronik braucht normalerweise 5V und verkraftet maximal 5,2 bis 5,5V . (Ok, manchmal auch nur 3,3V) Die höheren Spannungen (bis 8.4V) müssen irgendwie auf der Strecke bleiben. Geht ganz einfach (=billig) mit Widerstand und Z-Diode. Aber sehr störanfällig. Und ein Low-Drop-Spannungskonstanter kostet Geld, das wird der chinesische Kaufmann seinem Elektronik-Entwickler niemals genehmigen....
Jedenfalls können jetzt die Empfänger und Servos mit höheren Spannungen gekillt werden, ohne dass das Kreuzmischer-Modul mit in den Tod gerissen wird. ![]()
Aus "ich hab bei der Arbeit Grade Zeit um von wilden Konstruktionen zu träumen"-Gründen:
Hast du zufällig auch vor etwas ähnliches als "Waffenmodul" zu bauen?
Also diese ganzen Kleinigkeiten wie endschalterkontrolle etc. Aus deinen 3-Kanal-Reglern, falls jemand einen brushless Hammer oder sowas bauen will?
Oder ist das vllt garnicht möglich?

Hast du zufällig auch vor etwas ähnliches als "Waffenmodul" zu bauen?
Also diese ganzen Kleinigkeiten wie endschalterkontrolle etc. Aus deinen 3-Kanal-Reglern, falls jemand einen brushless Hammer oder sowas bauen will?
Das o.g. Kreuzmischermodul ist primär dafür gedacht, zwei separate Brushless-Regler so anzusteuern, dass damit eine sinnvolle Kreuzmischerfunktion erfüllt wird.
Das, was Du als komplette Ansteuerung für eine Waffe verwenden willst, und aus dem 3Kanal-Regler (Fahrtregler4_7: 2x Fahrtregler; 1 x Waffenkanal) extrahiert ist, gibt es schon:
Je nach Dauer des Leistungsbedarf in zwei Varianten. Einmal um Gewicht zu sparen oder andererseits, um wirklich einen Spinnermotor mit 80A Dauerstrom zu befeuern.
Es gibt eine sehr große Auswahl an Funktionen, auch z.B. einen Sequenzer um zwei Pneumatikventile zeitversetzt anzusteuern, so dass ein Flip-Up automatisch auch gleich wieder in die Ausgangsstellung zurückgebracht wird, etc.... (=> Gedacht, um z.B. bei Hockey-Bots den Puck abzuschießen und den Schläger gleich wieder in Abschuss-Position zu bringen.)
Vorstellung Powerswitch_Duo1 im Forum
Was laut Deiner o.g. Anforderung nicht geht: Einen Brushless-Motor damit ansteuern. Dafür bräuchte man drei Endstufen, hier sind aber nur zwei verbaut.
Aber: Das hier vorgestellte Modul heißt "Powerswitch_Duo". Es spräche also nichts dagegen, einen "Powerswitch_Trio" zu entwickeln.
Die Frage ist nur: Will diese Baugruppe überhaupt jemand? Aktuell werden bei den Fahrtreglern auch diejenigen aus China verwendet und nicht meine Entwicklungen. => Die Bauteile, die ich verwende, kosten mir schon mehr als ein kompletter Regler aus CN. Absolut verständlich, dass lieber zwei einzelne Regler für je 40 Euro verbaut werden, also ein Zweikanal-Regler von mir für 110 Euro. (Offiziell ![]() )
)
So eine Entwicklung kostet viel Zeit und ich muss auch ein paar Prototypen bauen. Ist also etwas ernüchternd, wenn man sich fragt:
"Was ist der Unterschied zwisch Shappy und dieser Baugruppe" => "Shappy ist für den Hund, diese Baugruppe für die Katz' "
Genau der brushless-teil wäre tatsächlich interessant für mich, einfach weil Bürstenmotoren oft so unglaublich hochtourig drehen...
Aber für ein "ich hab da eine vage Idee" lohnt es sich natürlich nicht deswegen irgendwas zu entwickeln.
Nur hättest du das sowieso vor gehabt, hätte ich das eventuell einplanen können.
Nur hättest du das sowieso vor gehabt, hätte ich das eventuell einplanen können.
Wenn ich einen Dreikanal entwickel, dann wenn entweder eine konkrete Anfrage da ist und die Chance besteht, dass u.U. auch mehrere Roboteers da Interesse hätten. Bis jetzt bist Du der Einzige.
Es kann sein, dass ich die drei einzelnen Kanäle mal zum Schalten verwenden will. (Für Rockey-Bots. Brauche noch einen Schaltkanal für den Kompressor). Aktuell habe ich aber noch zwei andere Entwicklungsprojekte in der Warteschlange. Kann also noch dauern.
Keine Ahnung was du vorhast, aber vielleicht reicht das von BBB. https://shop.bristolbotbuilders.com/product/lisboard/
Wenn es nur um einen Ersatz für einen Endlagenschalter-Unterbrecher geht: So ein kleines Modul habe ich hier irgendwo rumliegen, kann ich Dir schenken.
Nachteil von solchen zwischengeschalteten Modulen: Die beeinflussen nur das Empfängersignal. Es muss also die ganze Prozessschleife durchgereicht werden, bis der Motor mal abschaltet (bzw. bei brushed-Motoren eine Stotterbremse und einen Kurzschluss abkriegt, um möglichst flott stehenzubleiben). Bei den Abgriffen der Endlagenschalter direkt am Fahrtregler geht das prior in die Ansteuerung der Motorendstufen rein. ![]()
Geht tatsächlich um einen Mechanismus auf Federspannung basierend, ich glaube irgendwo hatte ich den Cho Cho Mechanismus Mal als Gedankenspiel gepostet... Wichtig wäre dabei eben ein automatischer Stop in bestimmter Position, den ich dann übergehen und anschließend weiter drehen kann.