- Offizieller Beitrag
Hi zusammen,
nachdem Nina beim MMM mit Yggdrasil nicht zufrieden war (hat immer wieder vorne und hinten verwechselt, was zu mehreren unbeabsichtigten
Fahrten in die Grube geführt hatte), wollte sie irgendetwas, wo man eindeutig erkennt, wo vorne und hinten ist ![]()
Ausserdem sollte der neue Bot eine Waffe haben, damit "ich nicht nur schubsen kann, sondern auch mal Schaden machen kann, wenn ich
einen erwische - am besten so was wie Tombstone"
Na gut, dann hier mal der Rohentwurf:
Gewicht liegt jetzt bei 12.7 Kg, Schwerpunkt 47 mm vor der Motorachse - sollte sich also gut fahren lassen.
Von den Polycarbonat-"Blattfedern" für die Motorhalter verspreche ich mir geringere Last auf die Getriebe und
Achsen beim Sutrz auf die Räder.
Was noch feht, ist der Antrieb für den Spinner. Da bin ich auf der Suche nach einem Motor mit einer Länge von max. 40 mm (ohne Achse).
Wird es wohl in der benötigten Leistung und Größe nur als Brushless geben.
Spinnerdrehzal ist mal so ca. 5000 u/min angedacht, das Riemenrad auf dem Spinner hat 40 Zähnre. Mit dem Rad auf dem Motor
kann ich dann von 12...40 Zähne variieren, brauche also einen Motor, der mit ca. 5000-16000 U/min dreht, damit ich das anpassen kann.
Gibt es da Empfehlungen ? Im Hobbykig-Katalog werde ich erschlagen von Motoren, aber ich weiß nicht mal, welche Leistung ich brauche.
BL-Leistung ist ja nicht direkt mit Brushed-Leistung zu vergleichen.
In LB dreht der Spinner in ca. 4 Sekunden hoch, die beiden Motoren diehen dabei >200A (weiter geht mein Meßgerät nicht) bei 14V, das ergibt
für mich als Laien ca: 2.8 KW. Die Motoren sind mit 150W angegeben. Also was für einen BL-Motor würde ich größenordnungsmäßig
brauchen ? einen der mit 150W angegeben ist, oder einen, der mit 3 KW angegeben ist ? Würde hier ein Billigst-ES reichen (weil ich da ja
nicht groß regeln will, sondern einfach nur Ein/Aus brauche, nicht mal vor/wückwärts) ?
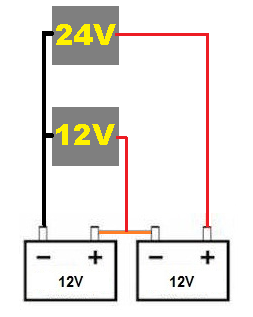
Sollte am besten mit 3S LiPo laufen, notfalls auch mit 4S (3S wäre mir lieber, wegen den Fahrmotoren)
LG
-Michael