- Offizieller Beitrag
Nachdem das Testmuster bei Jojo für den praktischen Test in KCFOS vorliegt, habe ich mal eine kurze Beschreibung von dem neuen Powerswitch_Duo1 gemacht.
"Duo" deswegen, da wahlweise bis zu zwei Schaltkanäle ausgelöst werden können. Dabei sind natürlich diverse Spezialfunktionen integriert, die ein Roboteers bei seinem Bot bzw. Waffensystem gut brauchen kann.
- Monoflop-Pulse fest hinterlegt,
- Monoflop-Pulse über die Fernsteuerung variabel,
- Sequenz-Auslösungen der beiden Kanäle,... .
Und natürlich eine H-Brücken-Funktion für einen Waffenmotor.
- Entweder schaltbar (z.B. für Hammerfunktion)
- Oder variabel, wie bei einem normalen Fahrtregler. (=> z.B. für Selbstaufrichtung)
- Oder die beiden Ausgangskanäle parallel schalten, um für einen Spinner-Motor den doppelten Strom ziehen zu können.
Für jeden Ausgangskanal steht natürlich ein Eingang für einen Endlagenschalter zur Verfügung.

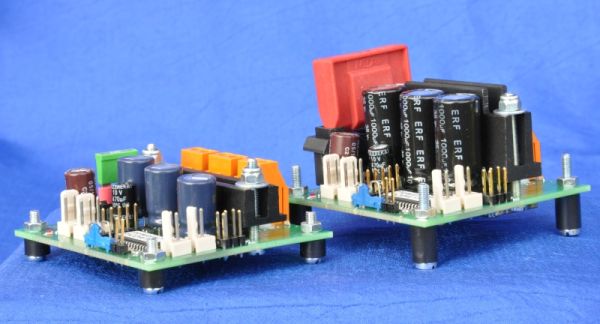
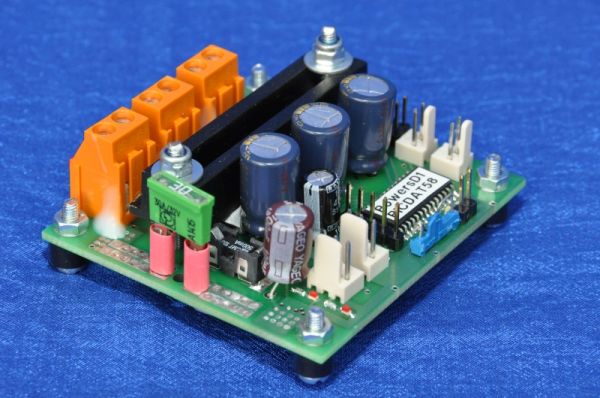
Es gibt zwei Anschlüsse für Empfängerkanäle. Ebenso zwei Endstufen, die entweder als H-Brücke oder als zwei getrennte Schalter verwendet werden können.
Am rechten Baugruppenrand sind zwei Anschlüsse für Endlagenschalter vorhanden.
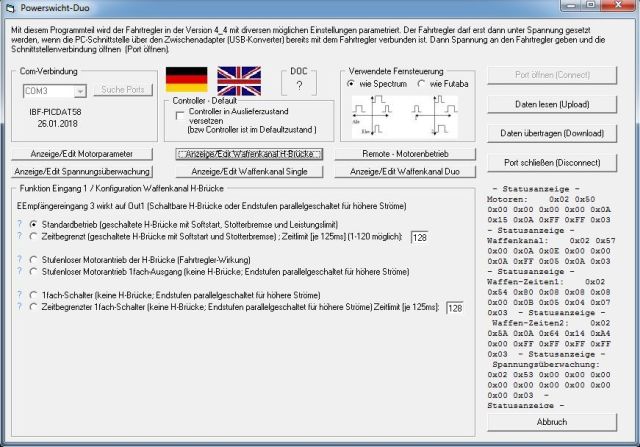
Mit dem PC-Programm sind sehr umfangreiche Parametrierungen möglich. Damit die grobe Übersicht leichter fällt, habe ich die Menüpunkte in drei Menügruppen unterteilt:
- H-Brücken-Funktion
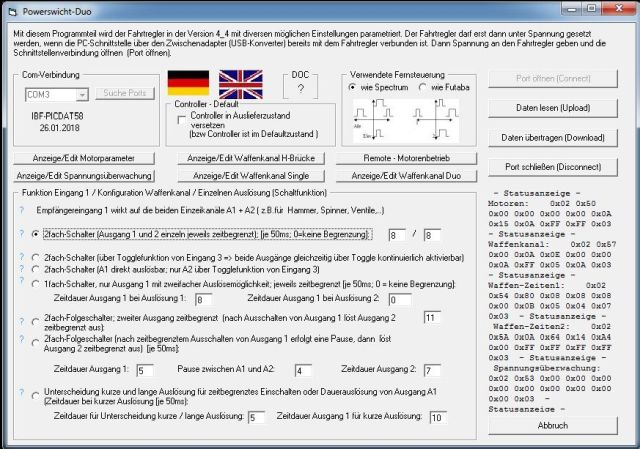
- Schalter Single-Betrieb (Ein Empfängereingang steuert bis zu zwei Schaltfunktionen)
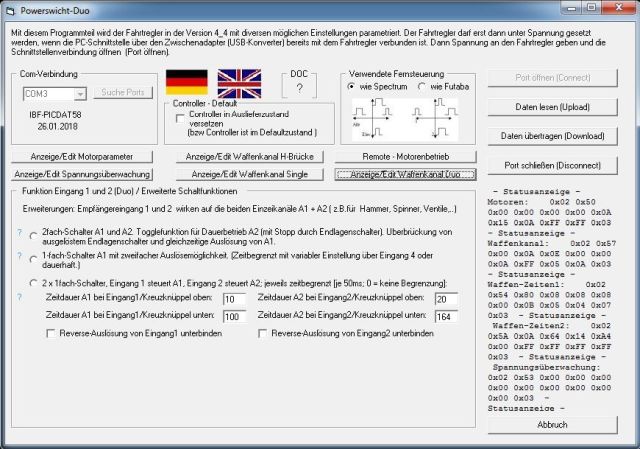
- Schalter Duo-Betrieb (Ein oder zwei Empfängereingänge steuern bis zu zwei Schaltfunktionen)
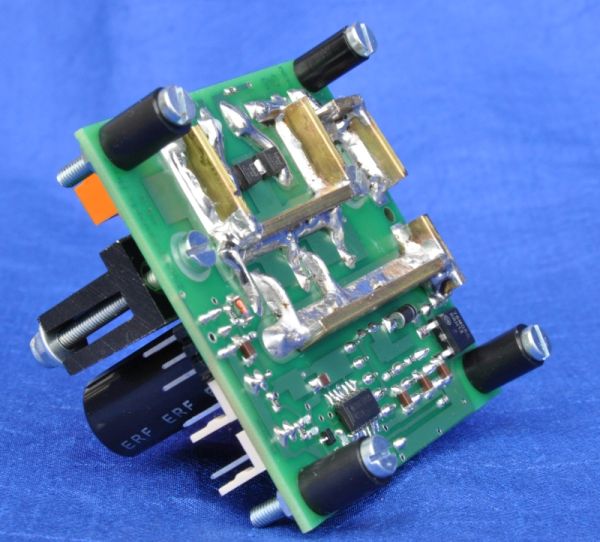
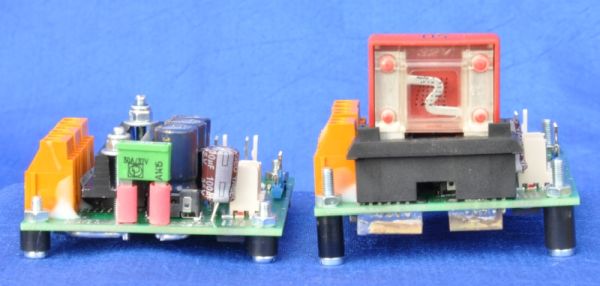
Wie auf den Fotos zu sehen ist, sind relativ große Kondensatoren, eine Sicherungsfassung für bis zu 40A und ein Kühlkörper vorhanden.
Wer als Anwendungszweck nur Ventile schalten will, dem würde eine wesentlich kleinere (und platzsparendere) Version ausreichen. In diesem Fall würde eine kleine Sicherungsfassung und kleinere Kondensatoren verbaut. Auf das Kühlblech wird verzichtet. Damit ergibt sich eine Einsparung in der Höhe der Baugruppe.
Eine Kurzbeschreibung mit der Menü-Übersicht des PC-Programms ist auf meiner Homepage abzurufen
http://robots.ib-fink.de/powerswitch_du…switch_duo1.htm
Auszugsweise die Übersicht über die möglichen Konfigurationen: