
Schade René. Viel Erfolg bei der Arbeitssuche.

110Kg Bot ... Luzifer
-
-
Ich hoffe das du bald etwas neues findet.
-
- Offizieller Beitrag
Schrieb es und hatte den RoboteQ schon in der Hand, das war mal ein Blitzversand, trotz Feiertage, am Donnerstag Bestellt, Freitag ist er auf Reisen gegangen aus Scottsdale Arizona USA, und war dann heute Punkt 12 Uhr an meiner Haustür (und das mit DHL, da hab ich ja schon anderes Erlebt, gerade von DHL), Einglück haben wir auf der anderen Straßenseite gleich eine Sparkasse, so konnte ich die 120 EUR Zollgebühren Bezahlen, Krass das die davon aus gehen das man soviel Bares zu Hause hat, am Besten unter dem Kopfkissen, aber hat alles geklappt!
Und siehe Endland Thread, auch die Richtige Entscheidung gewesen, so wie es aus sieht, Starten die Dreharbeiten zu Staffel 9 von BBC2 RobotWars ja schon im Dezember, damit liege ich dann gut im Rennen der neue Bot liegt gut in der Zeit!

-
- Offizieller Beitrag
Dann hoffe ich, dass mit dem neuen Regler alles in Ordnung ist und Du nicht wieder einen Reinfall bei der Inbetriebnahme hast. (Ich denke da an die Tests von Dir mit dem anderen Regler, um herauszufinden, wie man das "Ignition" verwendet, usw....)
-
- Offizieller Beitrag
Heute mal ein Foto von den guten Stück gemacht...

muß mir jetzt erst mal Gedanken machen, wie ich diesen Single Channel Controller am besten im Bot verkabel, kein Wunder das der Controller so schwer ist, bei diesen Kabelbaum und wie gesagt, Single Channel das ganze soll nach diesen Schema verbunden werden...
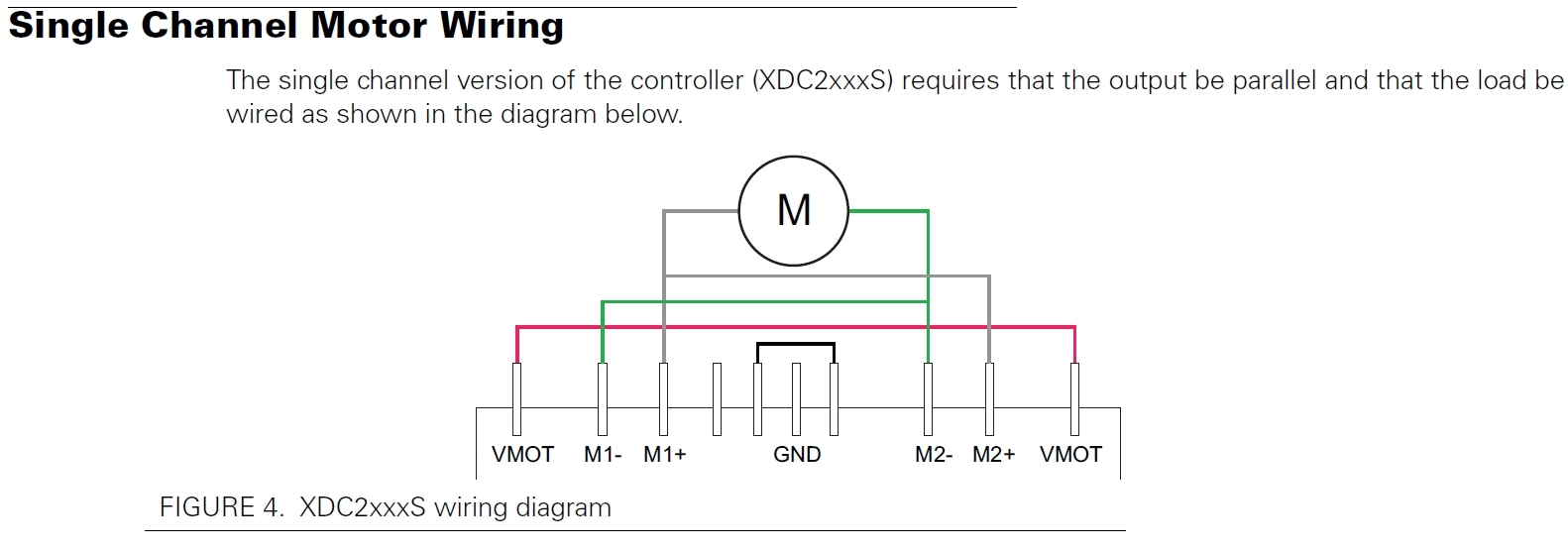
glaube mit einer anderen Software auf den Controller hat man locker einen Dual Channel Controller, also muß ich mir was überlegen, wie ich Sie zusammen schließe ohne zu viel von den Original Kabeln weg zu nehmen, was man später noch brauchen könnte, aber auch soviel das es im Bot nicht stört und vor allem nicht all zu viel Gewicht raubt!

-
- Offizieller Beitrag
Es geht mich nichts an, was Du mit den Anschlussdrähten machst. Aber mein Tipp wäre, sie nicht zu kürzen, sondern jeweils einzeln bis zum Motor zu Verlängern.
So wie es sich bei meinem Fahrtregler im Monoblock-Mode bewährt hat:
Damit wären beide Endstufen symmetrisch belastet. Hilft ja nicht, wenn der Strom von einer Endstufe in die andere Endstufe fließt, statt in den Motor.
Ausserdem kriegst Du bei den hohen Strömen auch mehr Power zum Motor.
(Wer letztes Jahr auf der Modellbaumesse in Castrop-Rauxel mit dabei war: Diese Beschaltung ist mittlerweile bei dem großen Panzer mit 300kg Eigengewicht eingesetzt. Beim Anfahren fließen fast die maximal zulässigen 110A pro Motor. => Der Fahrtregler hält es aus => Die Beschaltung ist also "fahrtregler-schonend" und bringt trotzdem alles an Strom, was möglich ist.)
-
- Offizieller Beitrag
Die Sache ist nur das das alles 10mm² Kabel sind und allein vom Gefühl an die 2 Kg wiegen, also keine kleinen Drähte, was soll ich mit 4x 10mm² Kabel bei 30cm Zuleitung, im Grunde doch völlige Gewichtsverschwendung!
-
- Offizieller Beitrag
Die Sache ist nur das das alles 10mm² Kabel sind und allein vom Gefühl an die 2 Kg wiegen, also keine kleinen Drähte, was soll ich mit 4x 10mm² Kabel bei 30cm Zuleitung, im Grunde doch völlige Gewichtsverschwendung!
Wie gesagt, ich kann Dir nur ein paar Tipps geben, wie man es macht oder "nicht machen soll".
Zwei 6qmm-Drähte sind effektiver als ein 10qmm-Draht. => Es geht darum, den Strom aus der Endstufe zu kriegen, und zwar so, dass beide Endstufen gleich viel leisten müssen. -
- Offizieller Beitrag
Wenn ich Reiner richtig verstehe möchte er vermeiden, dass durch unterschiedliche Leitungslängen pro Motorstufe unterschiedliche Leitungswiderstände auftreten. Damit wäre der Widerstand für eine Endstufe geringer als für die andere und würde mehr belastet. Bei den hohen Strömen kann sich das schon auswirken. Gleiches gilt natürlich auch für die Kabel / Brücken der parallel geschalteten Akkus, sonst macht ein Zellenblock eher dicke Backen.
-
- Offizieller Beitrag
Hab übringends nun meinen Waffen Antrieb gegenüber den Vorgänger Bots um einiges Verbessert, wer es noch nicht weiß, steht ja auch nicht im Thread, als Waffen Motor habe ich nun auch einen Perm080 Motor, Dank Dirk (bad_boy) der mir seine beiden Verkauft hat, habe ich nun sogar einen Motor in Reserve, das Waffen Getriebe wurde Erweitert, vorher hatte ich eine 1:90 Untersetzung (ala Sever Snake Stile 2009) nun habe ich das ganze um eine 3 Getriebestufe Erweitert und nochmal 1:2 vorne mit dran gesetzt, somit komme ich nun auf insgesamt 1:180, ist aber immer noch schnell genug, hab es mir durch gerechnet, Theoretisch müsste ich auf unter 2 Sekunden für den gesamten Waffenweg kommen, das reicht immer noch Dicke, und so sollte dann auch weniger Belastung beim Motor sein, Dank Strombegrenzung im RoboteQ Controller hab ich dann auch noch eine Sicherheit mehr das alles Heil bleibt, naja solange mich die House Roboter in Ruhe lassen!

-
- Offizieller Beitrag
...Dank Strombegrenzung im RoboteQ Controller hab ich dann auch noch eine Sicherheit mehr das alles Heil bleibt, ....
Darum der diskrete Hinweis, dass beide Endstufen möglichst gleichmäßig belastet werden. Der Widerstand der Verbindungsdrähte zum Motor spielt dabei eine Rolle.
(Ansonsten schaltet eine Endstufe schon ab und die zweite Endstufe dürfte die ganze Leistung alleine liefern. => Diese Endstufe geht dann auch in Überlast => Also schaltet sie auch ab.) -
- Offizieller Beitrag
So wie es immer so ist bei einem neuen Controller, ich habe einige Fragen und hoffe ihr könnt mir ein wenig weiter Helfen, als erstes hier die Anleitung...
http://devil-crew.eu/Luzifer/Neu.20…x.Datasheet.pdf
Die erste Sache wie schließe ich den Controller an den Computer an, es ist ja ganz Toll das drinnen steht das man stets RS232 dem USB bevorzugen sollte, aber ich habe keine RS232 Schnittstelle mehr, weder am PC noch am Laptop, Handy fällt wohl auch Raus!
Der Controller hat beides RS232 und USB Eingang, einen RS232 zu USB Converter habe ich, aber das verwirrt mich auch ein wenig, die RS232 zu USB Converter die ich selber habe und auch im Internet gefunden habe, haben alle nur 9 Pins, der Controller selber hat aber 15 Pins...
im Grunde erst mal nebensächlich, weil mir USB als Anschluß schon lieber wäre, weil beim Event ich eh Maximal meinen Laptop dabei habe um was ändern zu können!
Mein Problem es steht nicht beschrieben wie genau der Controller mit dem PC Verbunden wird, einfach USB Kabel rein und gut ist, ist halt nicht schon versucht, Probieren geht über Studieren,
aber mehr auch noch nicht, weil ich mir nicht sicher bin und lieber nochmal Fragen wollte, da muß wohl noch Strom zugeführt werden, die Frage ist über welche Zuleitung und wie viel...
ich vermute ja mal die oberen beiden Kabel, gelb und schwarz reichen, aber nach dem Schema wie das dann im Bot angeschlossen werden soll, ergibt es für mich schon wieder keinen Sinn...

diese beiden Kabel, wo ich vermutet habe das zum Programmieren Strom rein kommen soll, werden nach diesen Bild geschaltet, und zwar wie man sieht bekommen beide Plus je nach dem wie der SW1 Main Switch geschaltet wird, mich verwirrt das...
genauso wie die ganzen Bauelemente auf diesen Bild, was soll F2 1A sein und wofür, genauso wie F1 und nur 20A?
Oder ist das nur wieder so eine Interne Zeichnung die mir zeigt wie der Controller Arbeit oder muß das wirklich was außen dran?
Wenn das geklärt ist, hätte ich noch die Programmierung über den PC, habt ihr da Tipps für mich was ich wo und wie Einstellen muß...
Link zur Software http://www.roboteq.com/index.php/docm…pc-utility/file
mein Controller ist der XDC2460S kann man auswählen in dem man im Programm oben rechts das Häkchen bei "Work offline" setzt und in der Liste "Controller Modell" ganz unten meinen XDC2460S Auswählt...


Hab die Einstellungen mal Grob dem Perm080 angepasst, Strombegrenzung bei 160A Auslösung bei 200A wobei das schon das höchste der Gefühle ist, besser wäre wohl auch 160A wobei man das erst mal Testen müsste bei welcher Belastung der Waffe er dann dicht macht, wichtig wäre ja wenn die Waffe auf Endschlag geht und ich im Kampf zu lange gedrückt halte in der Postion, er abschaltet, es muß aber genug sein um mindestens einen 100Kg Bot zu Liften und mich zu Wenden Optimal ja sogar wenn ein Gegner auf mir drauf liegt, Drehzahl sind bei 24V 6000 U/min bei Perm080 komme ich wahrscheinlich eh nicht voll drauf, weil ich ja maximal nur 180 U/Sekunde brauche um die Waffe voll von Endpunkt zu Endpunkt zu bewegen (1:180 Untersetzung), bei Maximal 6000U/min sind das irgendwas zwischen 1-2 Sekunden!
Ja der Rest sind Böhmische Dörfer, nee ganze Menge Einstellungen die machen machen kann, wichtig ja nur das ich nicht aus versehen was Falsch Einstelle...
-
- Offizieller Beitrag
ich vermute ja mal die oberen beiden Kabel, gelb und schwarz reichen, aber nach dem Schema wie das dann im Bot angeschlossen werden soll, ergibt es für mich schon wieder keinen Sinn...
diese beiden Kabel, wo ich vermutet habe das zum Programmieren Strom rein kommen soll, werden nach diesen Bild geschaltet, und zwar wie man sieht bekommen beide Plus je nach dem wie der SW1 Main Switch geschaltet wird, mich verwirrt das...
genauso wie die ganzen Bauelemente auf diesen Bild, was soll F2 1A sein und wofür, genauso wie F1 und nur 20A?
Hab' Deine Infos jetzt nur grob gelesen, aber bei dieser Beschaltung ist mir aufgefallen:
Der Schalter "SW1 Main" hat seinen Mittelkontakt am Ausgang von dem Controller, also PwrCtrl. In der "aktiven Stellung" ist der Mittelkontakt also mit dem Ausgang von der 1A-Sicherung verbunden. Wird der Schalter umgelegt, dann wird PwrCtrl mit Ground verbunden.
Vermutung: Aus Gründen der Störsicherheit wird im Controller bei diesem PwrCtrl-Eingang ein Kondensator verbaut sein. Der soll Störspitzen abfangen. Wenn man nur die Verbindung zur Versorgungsspannung unterbricht, entlädt sich der Kondensator ganz langsam . Der Controller wird also viel später erst abgeschaltet.
Durch das Umlegen des Schalters auf Ground wird der Kondensator aber kurzgeschlossen. Damit stoppt der Controller sofort seine Arbeit.Diese Sicherung F2 mit 1A ist praktisch die Stromversorgung für die Elektronik des Controllers. Die ist separat abgesichert (Wenn in der Elektronik mal etwas schief laufen sollte, dann würde eine gemeinsame >100A-Sicherung mit den Motoren nicht auslösen. Die Elektronik würde verkokeln. Darum eine Sicherung, die auch schon bei kleinen Strömen auslöst. (Wobei mir 1A immer noch zuviel wäre, aber das ist Sache des Herstellers vom Fahrtregler....)
Diese Bezeichnung "Diode >20A" bezieht sich auf den Strom, den die Diode können muss. Sie ist in Sperrichtung, parallel zur Hauptsicherung.
Vermutung: Falls die Hauptsicherung auslöst, würden die laufenden Motoren eine Gegenspannung erzeugen. Die Diode soll diese Gegenspannung wohl vernichten.
Mit den "20A" ist also die Diode gemeint und nicht die Hauptsicherung.Der Digital-Out von dem Controller ist wohl so eine Art Hilfsschaltung, um die Endstufen erst dann (über das Relais) mit Spannung zu versorgen, wenn der Controller schon korrekt arbeitet. Zuerst muss also mit dem Main-Switch der Controller aktiviert werden. Wenn er sich initialisiert hat und alles korrekt ist, dann wird er das Relais aktivieren und dann erst kriegt die Endstufe ihre Power. Ansonsten passiert das, was auch bei unseren kleinen Bots erkennbar ist: Die Motoren zucken u.U. beim Stecken des Circuit-Breakers.
-
- Offizieller Beitrag
Wer suchet der findet, hat ein wenig gedauert, aber ich hab eine Anleitung gefunden wie der Controller Stück für Stück angeschlossen wird und wie bei der Programmierung vorgegangen wird, macht die Sache schon mal einfacher...
http://www.roboteq.com/index.php/docm…leshooting/file
jetzt muß ich mich bloß noch schlau machen über die ganzen Einstellmöglichkeiten des Controllers, damit das dann auch in einem guten Einklang mit dem Perm080 ist, viel zu tun noch bis Dezember, bleibt nur zu hoffen das ich auch dabei bin und der Einsatz sich lohnt, sonst wäre ich mit dem Bot erst 2017 gestartet und hätte alles ganz locker Fertig machen können, aber so auf jeden Fall ein gewisser Druck alles Fertig zu bekommen!
-
Ich stimme mit Reiner's Aussage, dass die Schaltung dazu dient unerwünschte Motor-Aktionen bei nicht hochgefahrenem Controller zu verhindern, überein. Der RoboteQ-Controller wird ja nicht nur bei Schaukampfrobotern eingesetzt sondern wird wahrscheinlich auch in "echten Robotern" seine Anwendung finden. Dort ist es doppelt wichtig, dass im uninitialisierten Zustand keine zufälligen Fahrmanöver durchgeführt werden. Noch wichtiger ist es dabei, dass in dem Fall, wo eine Person vor den Roboter tritt, dieser zuverlässig stehen bleibt. Dies lässt sich nur dann garantieren, wenn über eine Sicherheitsschaltung die Versorgung von der Entstufe weggeschalten wird.
-
- Offizieller Beitrag
So Richtig verstehe ich die Schaltung immer noch nicht...
Der Digital-Out von dem Controller ist wohl so eine Art Hilfsschaltung, um die Endstufen erst dann (über das Relais) mit Spannung zu versorgen, wenn der Controller schon korrekt arbeitet. Zuerst muss also mit dem Main-Switch der Controller aktiviert werden. Wenn er sich initialisiert hat und alles korrekt ist, dann wird er das Relais aktivieren und dann erst kriegt die Endstufe ihre Power. Ansonsten passiert das, was auch bei unseren kleinen Bots erkennbar ist: Die Motoren zucken u.U. beim Stecken des Circuit-Breakers.
Auf der Zeichnung geht der Akku von + direkt in VMot deshalb ja auch deine Annahme aber VMot geht zum Motor und nicht zum Akku, die andere Sache soll ich mir jetzt wirklich zwischen Motor und Controller ein Relais Rein klatschen vor allem wenn da gut und gerne 200A durch gehen, das geht ja schon wieder in Richtung Motorrad Anlasser, die beste Lösung wäre doch in meinen Fall eigentlich über den Digital Out direkt über einen Kanal meiner Funke zu Steuern, Schalter an Controller an, genau wie bei der Ignition vom 4QD Controller...
ich würde sogar soweit gehen, das ich den SW1 Main mit dem Digital Out Schalter Verbinde über ein Y Kabel auf einen Kanal damit ich beides gleichzeitig mit einen Kanal Schalten kann, ich meine ich weiß doch wann es Sicher ist meinen Controller ein zu Schalten, da brauche ich kein Relais für, ich glaube sogar das der Controller beim RC Betrieb dafür so vorgesehen ist, denn das Kabel was ich dazu Bestellt habe...
http://www.roboteq.com/index.php/robo…_product_id=203
hat 3 Servo Kabel Eingänge, da der Controller als Double Channel gebaut ist, wahrscheinlich bloß Software mäßig auf Single Channel Programmiert wurde, nehme ich mal an das, das 3 Kabel als eben dieser Digital Out Schalter dient, die sind sogar Nummeriert, mit 1-3 bloß ich finde darüber keine Anleitung, Sauge mir alles nur aus den Fingern!
-
- Offizieller Beitrag
Zitat von IceMasteraber VMot geht zum Motor und nicht zum Akku,
Das glaube ich nicht. Laut o.g. Zeichnung ist das der Eingang von der Versorgungsspannung.
Zitat von IceMasterdie andere Sache soll ich mir jetzt wirklich zwischen Motor und Controller ein Relais Rein klatschen vor allem wenn da gut und gerne 200A durch gehen, das geht ja schon wieder in Richtung Motorrad Anlasser,
Du brauchst ja keinen Anlassermotor, sondern nur ein Relais
Oder anders betrachtet: Warum hat der Hersteller in seiner Anleitung so viel Wert auf ein Relais gelegt, das vom Controller selbst angesteuert wird? => Er möchte eine Verzögerung zwischen dem Anlauf der Elektronik und der "Wirksamkeit" der Endstufen haben.
Alex hat das ja auch bestätigt, dass bei anderen Anwendungen mit wesentlich höheren Sicherheits-Bedürfnissen dies eine Möglichkeit ist, dass die Motoren bei Anlegen der Versorgungsspannung nicht unkontrolliert Bewegungen ausführen.Ich könnte mir auch eine handgebackene Lösung vorstellen: Mach' einen separaten Removeable Link, der nur die Elektronik versorgt. Zuerst also diesen kleinen Link stecken, dann ein paar Sekunden warten, und dann den Power-Link einstecken. Damit hast Du auch eine Verzögerung, um der Elektronik eine Chance zu lassen, sich zu initialisieren.
Was Du dabei nicht hast: Wenn die Elektronik durch den Reset geht, dann schlägt der Bot eiskalt aus. Zitat von IceMaster
Zitat von IceMasterich würde sogar soweit gehen, das ich den SW1 Main mit dem Digital Out Schalter Verbinde über ein Y Kabel auf einen Kanal
Moment! Du kannst die Information von den Dig-Out nicht an den Schalter legen. (=> Das wäre der berühmte Hund-beißt-sich-selbst-in-den-Schwanz-Effekt). An dem Dig-Out kommt nur dann eine Spannungsinformation heraus (dieser Pin ist normalerweise "offen" und wird dann auf GND gezogen, wenn der Controller fahrbereit ist), wenn die Elektronik eine Versorgungsspannung hat und sich initialisiert hat. Aber das geht nur, wenn der SW1-Main so eingestellt wurde, dass er eine Versorgungsspannung in den Controller leiten kann. Ohne diese angelegte Versorgungsspannung wird Dir der Digi-Out niemals den Ausgangspin auf GND herunterziehen können.
-
- Offizieller Beitrag
Die Sache ist, ich habe noch nie einen Engländer gesehen der in Verbindung mit den RoboteQ dort ein Relais ran geklemmt hat, geschweige den eine 200A Sicherung zwischen Motor und Controller und der hier hat 3 Servokabel Ausgänge...

das muß doch was bedeuten, bloß ich finde keine Anleitung für den RC Betrieb mit Kampfrobotern, die muß es doch eigentlich irgendwo geben, immerhin wurde der Controller schon 100 fach in Kampfrobotern verwendet, da muß es doch auch nee Anleitung für den RC Betrieb geben!
Und das bestätigt es ja Fast...
http://www.robotmarketplace.com/products/RTQ-RCCABLE1.html
Zitat von Robot Market PlaceThe RC cable allows the connection of a radio receiver to the controller; oneside of the cable fits into the 15 pins D sub connector and the other side hasthree servo style connectors which fits into the radio receiver for a three channelscontrol. In this way the controlled can be remotely controlled via Radio
Das glaube ich nicht. Laut o.g. Zeichnung ist das der Eingang von der Versorgungsspannung.
Das ist es ja, der Controller ist da ziemlich genau bezeichnet, beim Eingang Battery steht auch Battery und beim Eingang Motor steht Motor, darum wäre die Zeichnung oben meiner Ansicht nach Falsch, was bringt es mir wenn ich hinter dem Controller zum Motor (VMot) Frei gebe, zumal ich nach der Zeichnung vom Motor Ausgang zur Battery (Akku) gehen soll. macht keinen Sinn, ich muß doch erst mal vom Akku in den Battery Eingang, bevor bei VMot es dann auch zum Motor geht!
Hab ein Bild gefunden, da sieht man es genau...

edit:
Ich hab es mir jetzt mal etwas leichter gemacht und mal direkt John Findlay angeschrieben, der muß es ja Wissen
benutzt den Controller ja nicht nur einmal, dann sollte nichts schief gehen, bei ihm laufen die Bots ja und das sehr zuverlässig mit RoboteQ Controllern! -
- Offizieller Beitrag
Und das bestätigt es ja Fast...
20 Dollar für ein Adapterkabel von SUB-D15pol auf 3 x Empfängerbuchsen?
 Oh mann,... ich mache mit meinen Elektronik-Baugruppen irgendwie was falsch....
Oh mann,... ich mache mit meinen Elektronik-Baugruppen irgendwie was falsch....Zwei von den drei Empfängeranschlüssen sind logisch: Es ist ein Zweikanal-Fahrtregler, somit brauchst Du zwei Empfängersignale für die beiden Endstufen. Wenn diese Endstufen parallelgeschaltet werden, dann brauchst Du davon nur einen Anschluss. Welchen, das weis ich jetzt nicht.
Unerklärlich ist für mich derzeit noch der dritte Empfängeranschluss. Muss mir mal die Anleitung durchlesen, vielleicht finde ich da die Lösung.
-
Remote ignition vielleicht?
-