

- Offizieller Beitrag
An dieser Stelle möchte ich ein neues Featherweight-Projekt vorstellen.
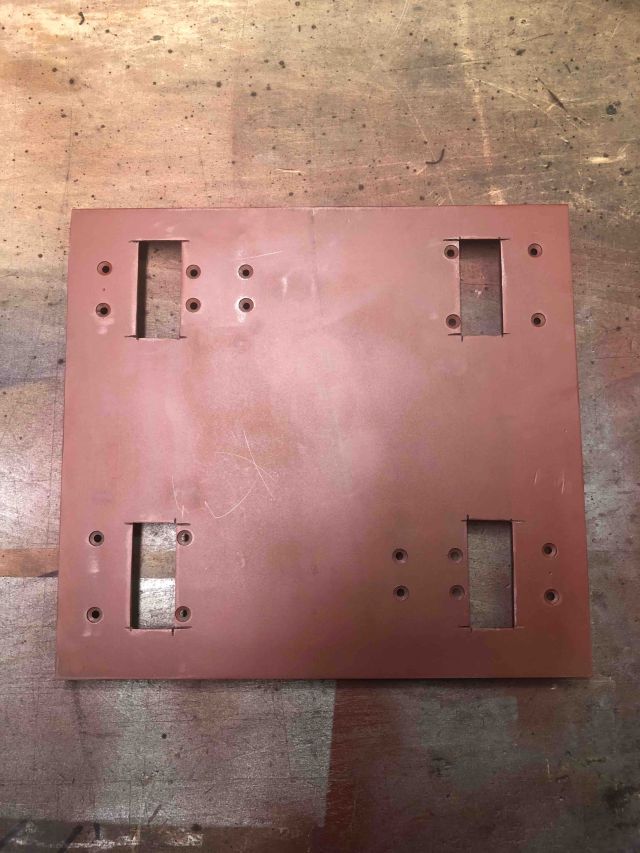
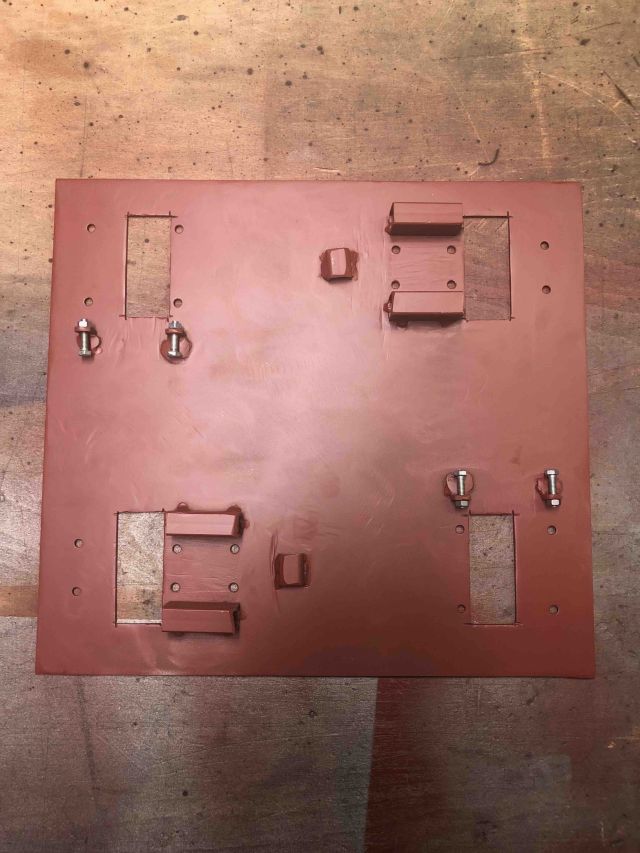
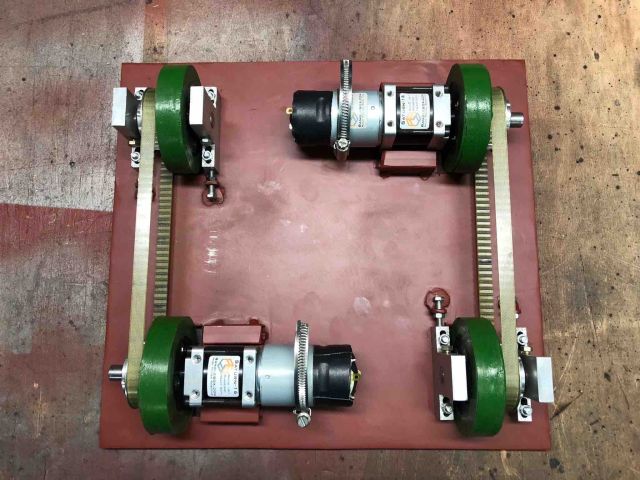
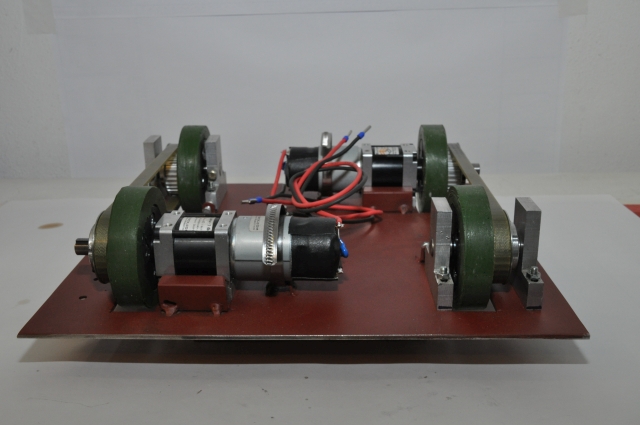
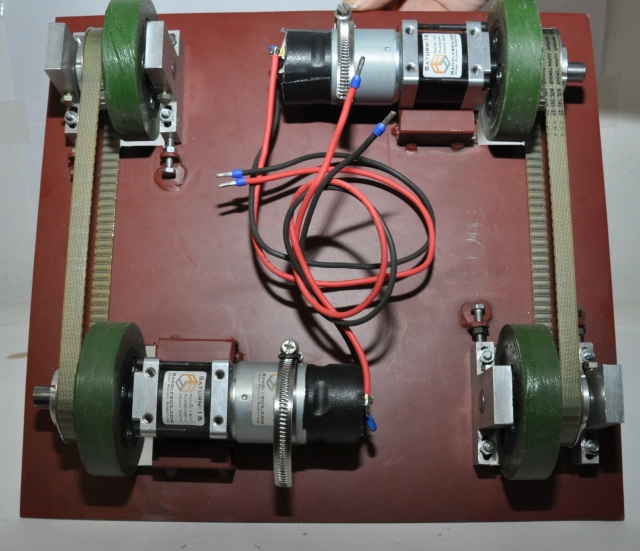
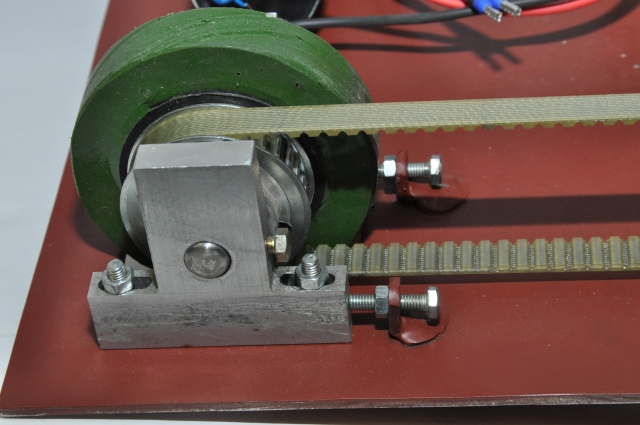
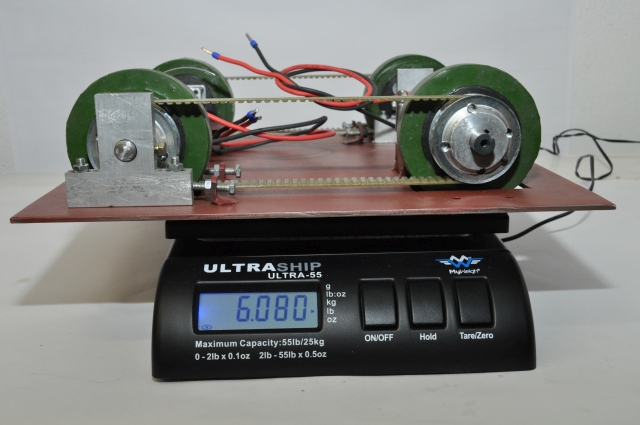
Die Idee geistert schon einigen Jahren im Team IBF herum, aber jetzt hat Flatliner-Dirk den Startschuss mit dem Erstellen von der Antriebseinheit gegeben. ![]()
Wer sich mit den älteren Filmen aus den 80er Jahren ein bißchen auskennt, der kennt bestimmt auch John Carpenters "Christine". Geht um einen Heckflossen-Auto (1958er Plymouth Fury) , das jeden umbringt, der sich ihm in den Weg stellt. Dabei läuft immer das Radio und spielt Musik aus den 50er Jarhen.
Gänsehaut-Feeling kommt auf, wenn sich das Auto auf die Lauer legt und dann, bevor es zuschlägt, die grellen Scheinwerfer eindimmt/einschaltet.

Quelle: Von Hylnder777 in der Wikipedia auf Englisch - Übertragen aus en.wikipedia nach Commons., Gemeinfrei, https://commons.wikimedia.org/w/index.php?curid=9982550
Wen der Inhalt des Films interessen: Hab' auf YouTube eine Zusammenfassung der besten Szenen gefunden.
Der Blendeffekt mit den Scheinwerfern ist besonders hier bei 1:30 gut zu sehen:
Ziel ist es, einen Pusher-Bot mit Vierrad-Antrieb zu haben, der als Show-Effekt die blendenden Scheinwerfer hat.
Ob die Heckflossen aus Gewichsgründen noch angebaut werden können, das muss sich erst noch zeigen.




 ... muss ich nochmal nachschauen.
... muss ich nochmal nachschauen. 