

- Offizieller Beitrag
Von Marien hatte ich einen Fahrtregler zur Untersuchung geliehen bekommen. Wegen chronischem Zeitmangel hat das ein bißchen gedauert, aber jetzt wollte ich euch das mal zeigen.
So sieht der Fahrtregler bei abgenommenem Kühlkörper aus: 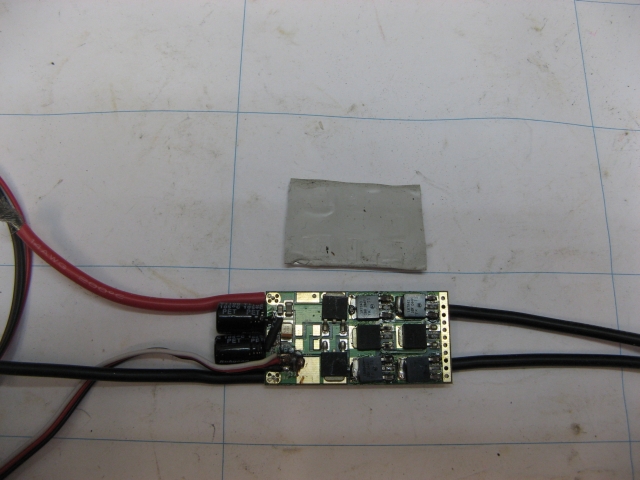
Es handelt sich hardwaremäßig um einen Speedcontroller für einen Brushless-Motor. Darum sind drei Endstufen-Halbbrücken vorhanden, wobei hier nur zwei Halbbrücken in Betrieb sind. So wie ich das verstanden habe, gibt es einen Software-Hack, der diesen Fahrtregler für einen Brushed-Motor anwendbar macht.
Als MOSFETs kommen die IRLR7843PBF zum Einsatz. Datenblatt gibt's beim RS-Components: Datenblatt IRLR7843
Markant ist, dass die Bauform mit dem D-PAK-Gehäuse kleiner ist als das übliche (vergleichbare) TO220-Gehäuse.
Mich hat ein bißchen die Wirkungsweise interessiert und darum das Ausgangssignal mit dem Oszi untersucht:
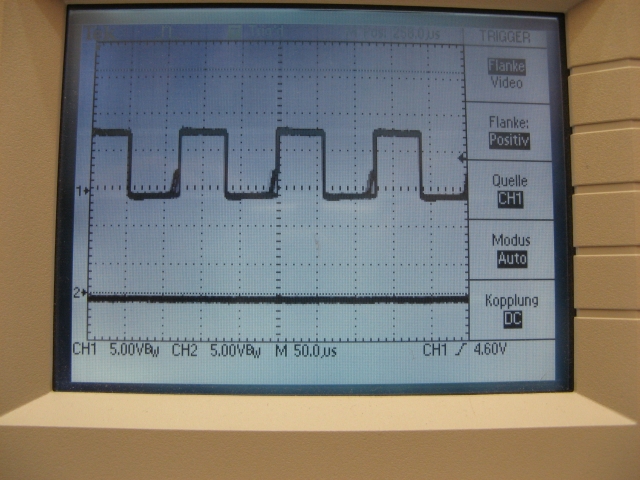
Die große Überraschung ist, dass die Pulsweite nur ca. 125µsek beträgt. Das entspricht einer PWM-Frequenz von 8kHz. (Ich hatte bei meinen Fahrtreglern die Frequenz mittlerweile von 4kHz auf 1kHz heruntergesetzt.)
Ein Verhalten der Software stört mich ganz gewaltig: Bei einer gehobenen Pulsweite wird schlagartig auf 100% umgeschlaltet. Der obere Bereich wird nicht sauber ausgeregelt bzw. angesteuert.
Hier mal ein Video mit dem Verhalten. Bitte beachtet das Oszillogram, wenn es ca. 80% hat.
Video Botbiz-ESC_PWM
Zum Abschluss wollte ich noch wissen, wie das thermische Verhalten ist. Allerdings hatte ich zum Messen der Kühlkörper-Temperatur nicht den passenden Sensor. Statt einem üblichen NiCr-Sensor, der ganz wenig Masse hat und aufgeklebt wird, stand nur ein "Schweinestecher" zur Verfügung. Der hat viel Masse, so dass die Wärme des Fahrtreglers nur langsam in den Sensor kriecht.
Wen's interessiert, für den habe ich den Messzyklus zusammengeschnitten. Allerdings ist die Aussagekraft über das Temerpaturverhalten sehr gering. Video Botbiz-ESC Temperaturverhalten
Marien: Deine Fahrtregler sind jetzt wieder unterwegs nach Holland. Allerdings nach Weihnachts-Paketstress für die Post wird es wahrscheinlich ein bisschen dauern.