- Offizieller Beitrag
Obwohl Männer ja erfahrungsgemäß keine Bedienungsanleitungen lesen, habe ich für den Fahrtregler4_5 eine Dokumentation geschrieben. ![]()
Darin enthalten sind Hinweise über die vorhandenen Features, die unter der Motorhaube schlummern. Ebenso Hinweise über mögliche Fehlerursachen, wenn der Bot mal nicht so fährt, wie das eigentlich sein soll.
http://robots.ib-fink.de/fahrtregler4_5/Fahrtregler4_5.pdf
Ich glaube, derzeit wird das Feature mit der linearen Kreuzmischer-Steuerung noch etwas unterschätzt. Marien's Idee war ja, dass bei einer Kurvenfahrt auch das kurvenäussere Rad die Geschwindigkeit reduziert. Das kann man mit dem neuen Kreuzmischer individuell einstellen. Ich denke, damit kann man jedem Bot "Manieren beibringen", so dass ein gezieltes Steuern möglich ist. (Ausser es beherrscht jemand seine Panzersteuerung und kann mit der dritten Hand die Waffe auslösen ![]() , aber das ist nicht das Thema....)
, aber das ist nicht das Thema....)
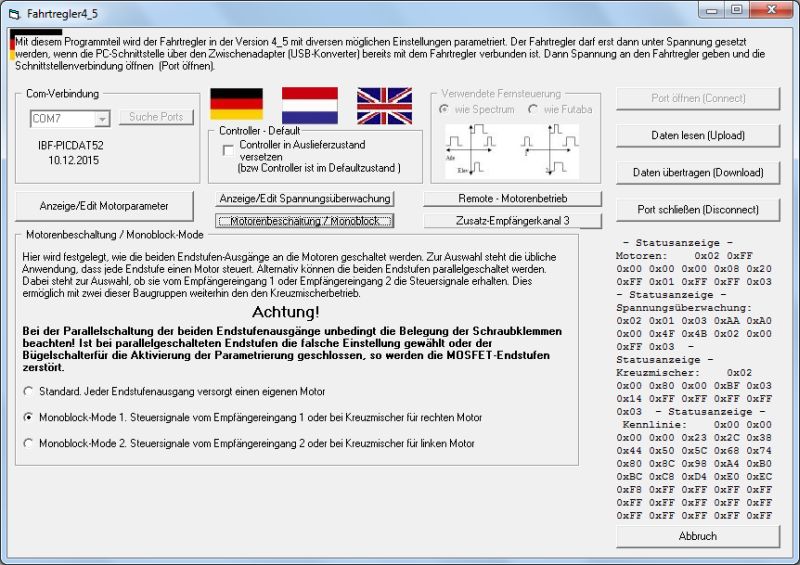
Hab' in einem separatem Kapitel die Einstellmöglichkeiten der linearen Kreuzmischersteuerung erklärt. Vielleicht verschwindet dann die Hemmschwelle, sie einzusetzen. ![]()
Wenn jemand eine Lücke auffällt oder Verbesserungsvorschläge hat, dann bitte melden. Die Doku sollte einigermaßen leserlich sein, bevor ich versuche, sie in's Englische zu übersetzen.
(Die holländischen Texte von dem PC-Programm fehlen noch, Babeth hatte offenbar noch keine Zeit dafür.)