

- Offizieller Beitrag
Wie ihr in anderen Threads gelesen habt, ist bei meinen Eigenbau-Fahrtreglern in der Software schon ein Kreuzmischer einprogrammiert. Kann man über die entsprechende Parametrierung aktivieren.
In den letzten Jahren hatte ich bei dem Kreuzmischer immer ein paar eigenartige Effekte und konnte mir das nie erklären.
- Rechter Kreuzknüppel nach vorne: Beide Motoren drehen nach vorne => Bot fährt vorwärts => ok
- Rechter Kreuzknüppel nach hinten: Beide Motoren drehen nach hinten => Bot fährt rückwärts => ok
- Rechter Kreuzknüppel nach links: Linker Motor dreht rückwärts, rechter Motor dreht vorwärts => Bot dreht im Stand entgegen dem Uhrzeigersinn => ok
- Rechter Kreuzknüppel nach rechts: Linker Motor dreht vorwärts, rechter Motor dreht rückwärts => Bot dreht im Stand im dem Uhrzeigersinn => ok
- Rechter Kreuzknüppel nach vorne (Vorwärtsfahrt) und dann nach ein bißchen nach rechts drücken: Sollte leichte Rechtskurve werden. Aber: Linker Motor wird langsamer, statt dass der rechte Motor langsamer wird. => Fehler
- Rechter Kreuzknüppel nach vorne (Vorwärtsfahrt) und dann nach ein bißchen nach links drücken: Sollte leichte Linkskurve werden. Aber: Rechter Motor wird langsamer, statt dass der linke Motor langsamer wird. => Fehler
Ich hatte das schon einige Male umprogrammiert und bin dann davon ausgegangen, dass hier durch das Vertauschen von Motoren (links/rechts) und dem gleichzeitigen Vertauschen der Polaritäten an den Motoren der Effekt entsteht.
Nachdem an diesem Wochenende nach dem Austausch eines Empfängers bei einem Ant (der vorher astrein gelaufen ist) der Effekt wieder auftrat, bin ich mal auf die Ursachenforschung gegangen.
Schuld sind die Funken. Die Spektrum DX5e und die Robbe Futabe FC16, die ich habe, senden die invertierten Signalrichtungen.
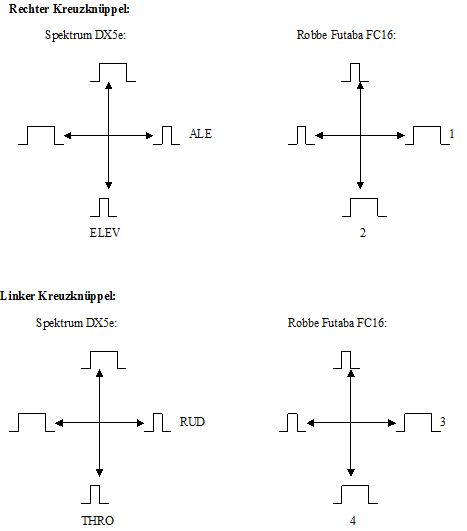
Bei den beiden Funken-Typen sind links/rechts und vorwärts/rückwärts vertauscht !
Normalerweise (also bei Panzersteuerung) merkt man das nicht. Denn da wird einfach die Polarität vom Motor vertauscht, und schon stimmts mit vorwärts/rückwärts wieder.
Um einen einheitlichen Stand zu haben, werde ich die Software für alle Fahrtregler so umprogrammieren, dass sie für die Spektrum stimmt. Wenn eine andere Funke, z.B. die Futaba, angeschlossen wird, dann muss in der Parametrierung gleichzeitig nur "vorwärts vertauschen" und "links/rechts vertauschen" mit aktiviert werden. (Ist ja alles bereits einprogrammiert.... ![]() )
)