

- Offizieller Beitrag
Auch bei mir ist bei MMM2 die erste Prototyp Version meines Raptor Reglers erschienen. Bei mir gibt es allerdings noch nicht so schöne PDF Dokumente und keine eigene Page wie bei IBF, dennoch werde ich kurz für diejenigen die es interessiert kurz darüber berichten... ![]()
(klick öffnet größere Ansicht...)
Wer beim MMM2 Event dabei war, der konnte den Regler ja bereits dort in Augenschein nehmen. Damals gab es noch einen Fehler in der Firmware der bei Vollgas früher oder später den Nullpunkt verschoben/gespiegelt hatte. Dieses Problem ist mittlerweile behoben. Dank geht hierbei an Normen für die Mithilfe bei der Entdeckung und der Beseitigung des Bugs...
Technische Daten:
* Eingangsspannungsbereich: 6-24V
* maximale Last (berechnet für Dauerbetrieb): 50A
* Abmessung in der Endfassung: 50x50x50mm
* CPU: ATmega8
* Treiber: HIP4081A, HIP4082, ...
* Endstufe: 4x IRF1405
* Sicherheitsmerkmale: Undervoltage Lockout, ShotThru Protection, Failsafe, Überlastschutz, ...
* Features: einstellbare Gaskurve, Nullpunktkalibration, einstellbare Strombegrenzung, bequeme Konfiguration über Host Programm am Rechner, einstellbare Smoothnessfunktion, Firmware Update über RS232, Inter Device Kommunikation, ...
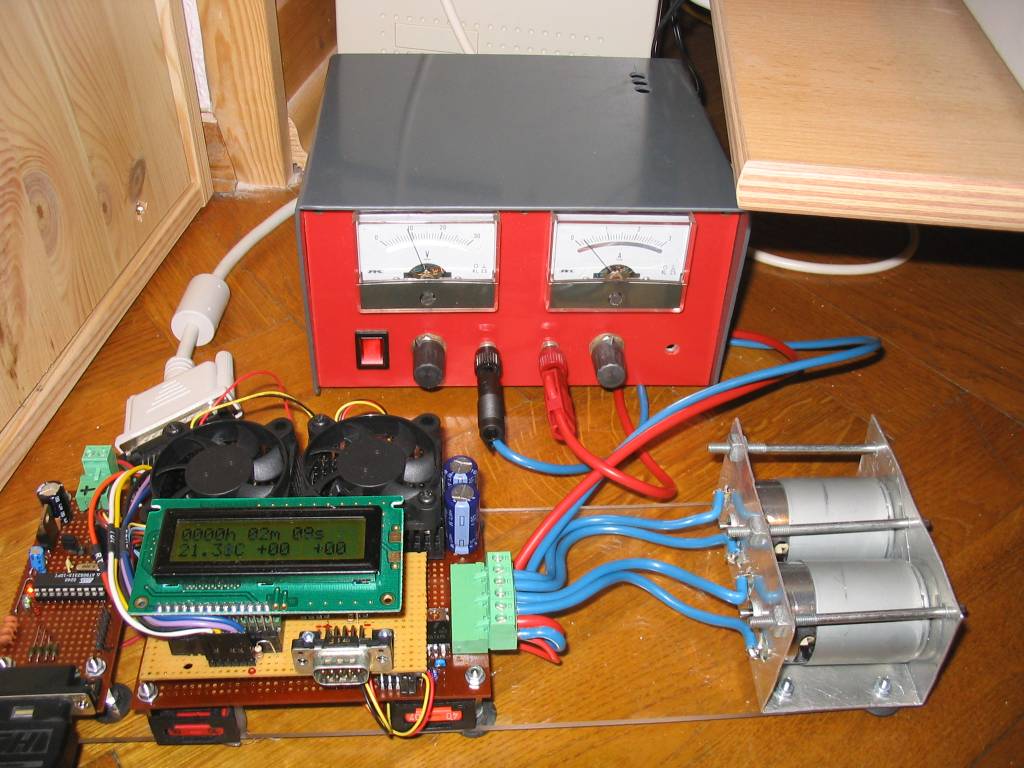
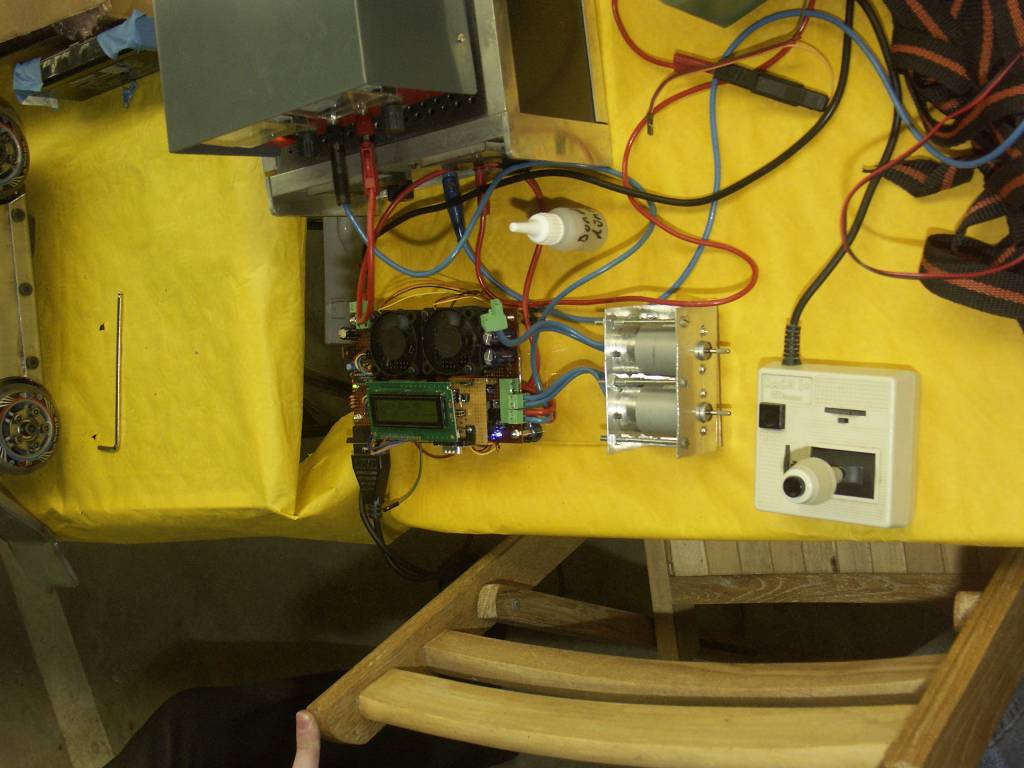
Was man auf den Bildern sieht ist lediglich ein Prototyp mit 2 Reglern auf dem Teststand. Links befindert sich ein 4 Kanal RC Puls Generator der über den Joystick die FB simuliert und rechts die beiden 550er Mabuchis als Testobjekte... Um der Frage vorzubeugen: Ja, der Regler soll auch in der Lage sein Motoren in der Klasse der 900er Turbos zu befeuern. Damit liegt das Einsatzgebiet in den Raptor und Featherklassen...
Das Thema Strombegrenzung ist derzeit eine der letzten größeren Baustellen und daher vorläufig als experimentell anzusehen...
Ab und zu oder auf Anfrage werde ich hier Neuigkeiten zum Thema posten...